TP Physique : Vecteur Vitesse et Mouvement

TP n° 2 : Comment déterminer et représenter le vecteur vitesse d’un point mobile ?
Le vecteur vitesse instantanée est caractérisé par :
- Sa direction : tangente à la trajectoire
- Son sens : celui du mouvement)
- Sa valeur ou norme : v = exprimée en m.s-1
- Son point d’application : le centre d’inertie du mobile)
Objectif : Savoir déterminer et représenter des vecteurs vitesses instantanées à partir d’un enregistrement.
I. Détermination de la vitesse instantanée et représentation de vecteur vitesses instantanées à partir
d’enregistrement réalisée sur une table à coussin d’air.
Dispositif :
Une feuille de papier recouverte de carbone conducteur est disposée sur la table à coussin d’air. Le mobile
est relié à un générateur d’impulsions électriques périodiques.
A chaque impulsion, une étincelle se forme entre l’électrode placée sous le mobile et la feuille
conductrice. Une marque se forme sur le papier à chaque impulsion.
Les impulsions sont séparées par des durées égales à 20 ms, 40 ms ou 60 ms.
Méthode de détermination de la vitesse instantanée et représentation d’un vecteur vitesse instantanée :
Fiche méthode
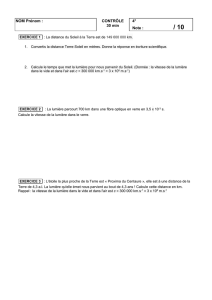
Détermination graphique de la vitesse instantanée au point M3 et représentation du vecteur
v3 =
Vous disposez de l’enregistrement suivant :
= 40 ms Échelle 1 : 2 1 cm sur le dessin représente 2 cm en réalité
Échelle de représentation du vecteur vitesse : 1 cm pour 0,1 m.s-1
- Dans un premier temps, numéroter les différentes positions du mobile
- Dans un deuxième temps, tenir compte de l’échelle et mesurer la distance M2M4 = ………… cm
Convertir cette distance en mètre ( 10-2) M2M4 = ………… m
- Dans un troisième temps, calculer la durée entre nécessaire au mobile pour parcourir la distance
M2M4. Convertir cette durée en seconde ( 10-3) 2
= …………. s
- Dans un quatrième temps , appliquer la relation v3 = = ………………...............= ………..m.s-1
- Dans un cinquième temps, représenter le vecteur vitesse au point M3.

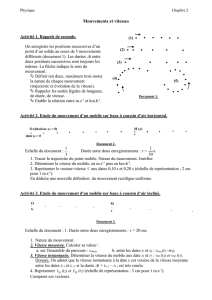
A. Mouvement rectiligne.
= 60 ms.
Échelle 1 : 1
Échelle de représentation du vecteur vitesse : 1 cm pour 0,05 m.s-1
Déterminer et représenter les vecteurs vitesses instantanées aux points M4, M8, M12 et M16
Questions :
1. Définir le mouvement entre les points M0 et M10 en utilisant certains mots de la liste suivante :
Rectiligne, circulaire, uniforme, accéléré, ralenti.
2. Définir le mouvement entre les points M10 et M18 en utilisant certains mots de la liste suivante :
Rectiligne, circulaire, uniforme, accéléré, ralenti.
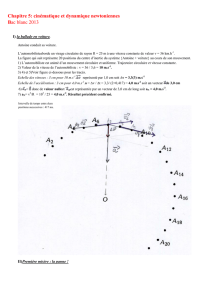
B. Mouvement circulaire.
= 20 ms. Échelle 1 : 2 Échelle de représentation du vecteur vitesse : 1 cm pour 0,1 m.s-1
1. Déterminer et représenter les vecteurs vitesses instantanées aux points M1, M3, et M5.
2. Déterminer et représenter les vecteurs vitesses instantanées aux points M’1, M’3, et M’5.
3. Mesurer avec un rapporteur les angles
1,
3,
5, décrits entre les deux dates qui encadrent l’instant
considéré. Les convertir en radian.
4. Déterminer les valeurs des vitesses angulaires
i aux trois dates précédentes pour les deux
enregistrements avec la relation
= . Comparer ces résultats et conclure.
5. Soit R la distance du point considéré au point O, centre de rotation du mobile.
On veut vérifier la relation v = R

Compléter les tableaux suivants :
M1
M3
M5
v (m.s-1)
R (m)
(rad.s-1)
R
m.s-1)
M’1
M’3
M’5
v (m.s-1)
R (m)
(rad.s-1)
R
m.s-1)
Questions :
1. La relation v = R
est-elle vérifiée ?
2. Montrer à partir des unités utilisées que R
s’exprime bien en m.s-1
3. Définir le mouvement entre les points M0 et M6 en utilisant certains mots de la liste suivante :
Rectiligne, circulaire, uniforme, accéléré, ralenti.
II. Réalisation d’une vidéo du mouvement d’un objet.
Objectif : Effectuer une capture vidéo du mouvement d’un objet afin de déterminer sa vitesse.
Matériel : Webcam Philips
Méthode :
o Placer en arrière plan du mouvement, une règle de 1,0 m de long qui servira à étalonner ultérieurement
la vidéo.
o Brancher la webcam et utiliser le logiciel de configuration de la caméra afin de définir les paramètres
les plus adaptés pour la capture vidéo.
o Donner un nom à la vidéo qui va être réalisée.
o Appuyer sur capture et mettre en mouvement l’objet.
o Arrêter la capture à la fin du mouvement.
Ce fichier sera exploité au prochain TP avec le logiciel Aviméca2 (téléchargeable gratuitement)

1
/
4
100%