angle espace

1
SOLIDE EN ROTATION AUTOUR D’UN AXE FIXE.
Les mouvements circulaires occupent une place importante en mécanique ; il existe en effet
peu de machines qui ne comportent une partie tournant autour d’un axe. L’usage est de
caractériser ces mouvements de rotation en tours par minute :
-5000 tours .min-1 pour un moteur d’automobile.
-33 tours .min-1 pour le plateau d’électrophone .
-5 tours .min-1 pour un manège d’enfants.
Ces données sont l’indication d’une allure de rotation pour l’ensemble du système, mais ne
correspondent pas à l’indication d’une vitesse toujours exprimée en m.s-1.
Dés que l’on évoque la vitesse, il faut préciser de quel point on parle quand il s’agit d’une
rotation .En effet la vitesse dépend de la position de ce point par rapport à l’axe de rotation.
Quand le solide effectue un tour (une période), tous les points du solide effectue un tour mais
les points périphériques défilent plus vite que les parties centrales.
1-Repérage d’un point d’un solide en rotation :
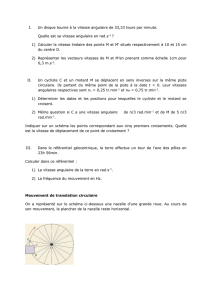
Considérons un plateau tournant autour de l’axe fixe perpendiculaire à son plan et passant
par son centre C. Un point M décrit un cercle de centre C et de rayon R .
Sur ce cercle, choisissons une origine Mo. La position du point M à la date t peut être donnée
par son écart angulaire ou son abscisse curviligne s qui sont des fonctions de t.
Par définition l’angle exprimé en radian (rad) est le rapport de la longueur de l’arc sur la
longueur du rayon :
R
s
,
Soit :
s = R . avec les unités : s (m) ; R(m) et (rad)

2
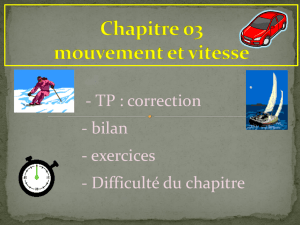
définition du radian : c’est l’angle au centre obtenu lorsque la longueur de l’arc s est
égale à la longueur du rayon. Cet angle vaut 57,29°.(1 rad=57,29° ;voir fig ci-dessous)
Si on fait le choix d’un sens positif de rotation , l’angle
sera compté positif s’il correspond à une
rotation dans le sens positif choisi et négatif dans le sens contraire :
et s sont donc des grandeurs
algébriques.
2-vitesse v d’un point et vitesse angulaire du solide :
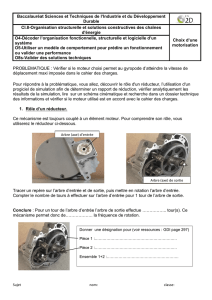
Observons le document ci-après. Il représente l’enregistrement du mouvement de 2 points A1
et A2 d’un disque en rotation. A1 se trouve au bord du disque et A2 à mi-chemin entre le bord
et le centre. L’intervalle de temps entre 2 points successifs est t=0,08s
Entre les instants t et t’=t+t le point A1 se déplace d’un petit tronçon de cercle s1 tandis que
A2 de déplace de s2.
Par définition la vitesse d’un point est l’espace parcouru par ce point par unité de temps.
Ainsi, à la date t ,le point A1 possède une valeur de vitesse VA1=
t
s
1
et le point A2 une valeur
de vitesse VA2=
t
s
2

3
Comme RA1=2.RA2 l’espace parcouru par A1 pendant t est le double de l’espace parcouru
par A2 ;
s1 = 2s2, et VA1=2.VA2.
La vitesse dépend donc du point considéré.
On appelle vitesse angulaire , l’écart angulaire balayé par le point A par unité de temps,
soit :
=
t
, { unité : rad.s-1}
L’écart angulaire est le même pour tous les points du disque pendant t, ainsi la vitesse
angulaire à un instant donné est la même pour tous les points du solide. On comprend qu’il
soit plus utile de faire intervenir
plutôt queV pour une rotation !
3-Relation entre vitesse V d’un point et vitesse angulaire du solide:
Nous pouvons appliquer la relation générale : s=R.. pour les petits déplacements :
Ainsi : s =R.d, donc :
t
R
t
s
.
et V= R. . {V(m.s-1), R(m) ,(rad.s-1)}
La vitesse du point A1 est :VA1=RA1. et celle du point A2 ; VA2=RA2..
Quand il s’agit de la vitesse d’un point périphérique, V s’appelle aussi « vitesse tangentielle »
ou « vitesse linéaire» .
Par exemple la vitesse d’une dent du pédalier animé d’une rotation par rapport au cadre du
vélo est aussi la « vitesse linéaire » de la chaîne par rapport à ce référentiel.
4-Cas d’un mouvement circulaire et uniforme:période et fréquence
Considérons un disque en mouvement circulaire et uniforme.
Dans ce cas v d’un point et du solide sont constants .
On appelle période T de rotation la durée nécessaire pour qu’un point du solide fasse un
tour.
La vitesse d’un point s’exprime en fonction de T et de la distance R du point à l’axe de
rotation par la relation :
Vitesse=
temps
cedis tan
soit, pour un tour :V=
TR..2
et vitesse angulaire=
temps
angle
,soit: =
T
.2
On appelle fréquence N, le nombre de périodes T en 1 seconde (le symbole « N » désigne le
nombre de tours par seconde).On a les relations :
N=
T
1
{ s-1 ou (Hz)} ; V=2..R.N {R(m) ; N(Hz) ;V(m.s-1)} ; =2..N {(rad.s-1) ;N(Hz)}

4
1
/
4
100%