Cours 6 : Interpolation - IA

- p. 1/42
Interpolation
VIET HUNG NGUYEN - FABIEN RICO
EPU Pierre et Marie Curie - Sicence de la Terre
Introduction
Le problème
Méthode
Interpolation polynomiale de f
Exemple
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Introduction - p. 2/42
Introduction
Introduction
Le problème
Méthode
Interpolation polynomiale de f
Exemple
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Introduction - p. 3/42
L’interpolation sert à transformer un ensemble de points en une
courbe Ensemble discret 7→ fonction continue
■Synthèse d’images (dessin vectoriel)
■Fonts
■Étude mathématique d’un ensemble de valeurs
■Prévisions
Introduction
Le problème
Méthode
Interpolation polynomiale de f
Exemple
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Introduction - p. 4/42
Le problème
■Soit une fonction fque l’on connaît sur un petit nombre de
points. C’est à dire que l’on connaît les valeurs
a0< a1<···< anet f0, f1,...fntelles que :
∀i∈ {0,1,...,n}fi=f(ai)
■On souhaite mieux connaître f,
◆calculer f(x)sur un grand nombre de points
◆connaître des propriétés mathématiques de f(par ex
l’intégrale).
■Mais on ne connaît pas fexplicitement
◆échantillonage,
◆fonction calculée par un code dont l’exécution est coûteuse
⇒Il faut « représenter » fpar une fonc-
tion simple
Comment choisir cette fonction?
Introduction
Le problème
Méthode
Interpolation polynomiale de f
Exemple
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Introduction - p. 5/42
Méthode
Soit gla fonction qui « représente » f.
■gdoit être proche de fc’est à dire :
◆coïncider avec fsur les points ai(i=0... n)
■polynôme d’interpolation de LAGRANGE
■splines
◆ou minimiser l’erreur sur les ai(moindre carré).
◆avoir des dérivées qui coïncident avec celles de f(BEZOUT).
■gdoit être simple
◆fonctions polynomiales,
◆fonctions polynomiales par morceaux
◆fonctions rationnelles
◆fonctions trigonométriques
■gdoit avoir de bonnes propriétés
◆régulière (Cn)
◆comportement entre les points d’interpolation
◆avoir des bornes d’erreurs sur f(x)−g(x)
Introduction
Le problème
Méthode
Interpolation polynomiale de f
Exemple
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Introduction - p. 6/42
Interpolation polynomiale de f
Nous ne nous intéresserons d’abord qu’au cas où gest une
fonction polynomiale ou polynomiale par morceaux.
Bases mathématiques
Théorème (STONE-WEIERSTRASS)Toute fonction continue sur un
intervalle [a, b]de IR est limite uniforme d’une suite de polynômes
Par exemple :
■polynômes de TAYLOR
■polynômes de CHEBYSHEV
■polynômes Minimax
Cela ne fonctionne que sur un intervalle fini de IR
Introduction
Le problème
Méthode
Interpolation polynomiale de f
Exemple
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Introduction - p. 7/42
Exemple
sin(x)
TAYLOR en 0x−x3
6+x5
5! −x7
7!
Minimax sur
[−4.5,4.5] −.818764947 ×10−8+.9016098105x
+.961831992 ×10−8x2−0.1238187316x3
−.1711139741 ×10−8x4+.3418771013 ×10−2x5
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Interpolation de LAGRANGE - p. 8/42
Interpolation de LAGRANGE

Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 9/42
Polynôme d’interpolation de LAGRANGE
Dans ce chapitre gsera le polynôme de degré nqui est égal à la
fonction fsur tous les point a0, a1,...an.
Théorème (Polynôme d’interpolation) Soient les n+ 1 points
distincts
(a0< a1<···, an)∈IRn+1,
il existe un unique polynôme Pde degré nqui coupe la fonction f
sur ces points i.e. tel que :
∀i∈ {0,...,n}P(ai) = f(ai)
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 10/42
Preuve et polynôme de LAGRANGE
Soient les n+ 1 points distincts (a0< a1<···, an)∈IRn+1, on
appelle base de LAGRANGE les polynômes de la forme :
Li(x) =
n
Y
k=0,k6=i
x−ak
ai−ak
∀i, j Li(aj) = (1si i=j
0si i6=j
Le polynôme :
P(x) = f0L0(x) + f1L1(x) + ···+fnLn(x)
Convient. On l’appelle polynôme d’interpolation de LAGRANGE
L’unicité est à démontrer en exercice.
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 11/42
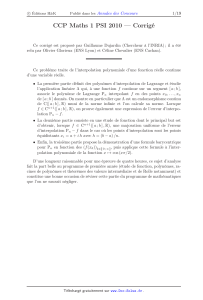
Exemple
a1
a6
a3
a4
a0
a5
a2
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 12/42
Calcul de l’erreur d’interpolation
Si on interpole la fonction f Cn+1 sur l’intervalle [a, b], par le
polynôme P(x)de degré n, grâce au points d’interpolation
a0< a1<···< an.
Théorème ∀x∈[a, b]il existe η∈[a0, an]tel que
f(x)−P(x) = 1
(n+ 1)!f(n+1)(η)φ(x)
avec φ(x) = (x−a0)(x−a1)···(x−an)
Id´
ee de la preuve :
On étudie la fonction g(z) = f(z)−P(z)−(f(x)−P(x)) φ(z)
φ(x)
gs’annule n+ 2 fois ⇒g′s’annule n+ 1 fois
...
⇒g(n+1) s’annule une fois en η
Or φ(n+1) = (n+ 1)! et P(n+1) = 0.
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 13/42
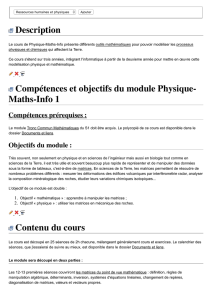
Exemple
f(x) = 0.5 + 2 ×e10x2
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 14/42
Étude de la formule d’erreur
f(x)−P(x) = 1
(n+1)! f(n+1)(η)φ(x)
avec φ(x) = (x−a0)(x−a1)···(x−an)
L’erreur dépend de :
■1
(n+1)! qui tend vers 0si n→ ∞.
■φ(x)qui tend vers ∞quand x→ ∞ .
⇒problèmes quand x→ ∞
■f(n+1)(η)qui dépend de la fonction fet de l’intervalle [a0, an].
⇒problèmes si un point est très différent des autres
(f(n+1) >> 1)
⇒le polynôme a tendance à osciller entre les points
d’interpolations
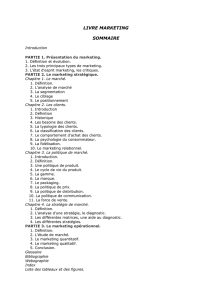
Certaines fonctions simples seront mal interpolées par un
polynôme.
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 15/42
Exemple
Introduction
Interpolation de LAGRANGE
Polynôme d’interpolation de
LAGRANGE
Preuve et polynôme de
LAGRANGE
Exemple
Calcul de l’erreur d’interpolation
Exemple
Étude de la formule d’erreur
Exemple
Autres méthodes
Spline Cubique
Régression linéaire
Introduction - p. 16/42
Autres méthodes
Comment améliorer l’interpolation?
■On découpe l’intervalle en petits morceaux,
■On utilise des polynômes de petit degré pour approcher la
fonction sur chaque sous-intervalle.
Par exemple :
■Fonctions linéaires par morceaux
■Fonctions quadratiques par morceaux
■Les splines cubiques (polynôme de degré 3 par morceau).

Introduction
Interpolation de LAGRANGE
Spline Cubique
Définition
Étude de g′′
Étude de g
Étude de g′
Cas des points réguliers
Algorithme
Exemple
Régression linéaire
Spline Cubique - p. 17/42
Spline Cubique
Introduction
Interpolation de LAGRANGE
Spline Cubique
Définition
Étude de g′′
Étude de g
Étude de g′
Cas des points réguliers
Algorithme
Exemple
Régression linéaire
Introduction - p. 18/42
Définition
Définition On appelle spline cubique d’interpolation une fonction
notée gqui vérifie :
■g(ai) = f(ai)pour i= 0,1...,n
■gcoïncide avec un polynôme de degré 3sur chaque sous
intervalle [ai, ai+1]
■gest C2sur [a0, an](deux fois continue et dérivable).
Cette définition ne permet pas de déterminer la fonction de façon
unique. Souvent on rajoute une condition par exemple :
g′′(a0) = g′′(an) = 0
Ce qui définit une spline naturelle.
Introduction
Interpolation de LAGRANGE
Spline Cubique
Définition
Étude de g′′
Étude de g
Étude de g′
Cas des points réguliers
Algorithme
Exemple
Régression linéaire
Introduction - p. 19/42
Étude de g′′
gcoïncide avec un polynôme de degré 3 sur chaque intervalle
[ai, ai+ 1]. Soit gice polynôme.
g′′
iest une droite sur [ai, ai+ 1].
Donc g′′ est complètement déterminé par les valeurs :
mi=g′′(ai)
On appelle les valeurs miles moments au noeud numéro i.
On note aussi
hi=ai+1 −ai
Alors :
g′′
i(x) = mi+1
x−ai
hi
+mi
ai+1 −x
hi
Introduction - p. 20/42
Étude de g
On peut intégrer g′′
ice qui donne :
g′
i(x) = mi+1
(x−ai)2
2hi−mi
(ai+1 −x)2
2hi
+ui
gi(x) = mi+1
(x−ai)3
6hi
+mi
(ai+1 −x)3
6hi
+ui(x−ai) + vi
avec ui, vi∈IR2
On cherche à éliminer les inconnues uiet vi.
On connaît les valeurs de gsur les points aidonc
gi(ai) = fi=mi(ai+1−ai)3
6hi+vi=mi
h2
i
6+vi
gi(ai+1) = fi+1 =h2
i
6mi+1 +uihi+vi
Ce qui donne
ui=1
hi(fi+1 −fi)−hi
6(mi+1 −mi)
et ui−1=1
hi−1(fi−fi−1)−hi−1
6(mi−mi−1)
Introduction - p. 21/42
Étude de g′
Enfin, on doit avoir continuité des dérivées donc :
−hi
2mi+ui=g′
i(ai) = g′
i−1(ai) = hi−1
2mi+ui−1
En combinant cela avec les deux résultats précédents, on trouve :
hi−1mi−1+ 2(hi+hi−1)mi+himi+1= 6 1
hi
(fi+1 −fi)−1
hi−1
(fi−fi−1)
pour i= 1,2, . . . n −1.
Cela nous donne n−1équations en les variables mià résoudre.
Donc n−1équations et n+ 1 inconnues.
Pour obtenir une solution unique, il faut rajouter deux équations :
m0= 0
mn= 0
Cela permet d’obtenir la valeur des moments miet d’en déduire les formules
de gi(x).
Introduction
Interpolation de LAGRANGE
Spline Cubique
Définition
Étude de g′′
Étude de g
Étude de g′
Cas des points réguliers
Algorithme
Exemple
Régression linéaire
Introduction - p. 22/42
Cas des points réguliers
Par exemple, si les points aisont équidistants i.e.
∀i, hi=h.
Alors, le système à résoudre est :
1
141
.........
1 4 1
.........
1 4 1
1
0
0
−→
m=
0
6
h2(f0−2f1+f2)
.
.
.
6
h2(fi−1−2fi+fi+1)
.
.
.
6
h2(fn−2−2fn−1+fn)
0
Introduction - p. 23/42
Algorithme
■Calcul des gi:
◆Calcul des moments mipar la résolution du système linéaire
◆∀i∈ {0,1,...,n−1}calculer les valeurs
hi=ai+1 −ai
ui=1
hi
(fi+1 −fi)−hi
6(mi+1 −mi)
vi=fi−h2
i
6mi
■Calcul de g(x):
◆Trouver l’intervalle qui contient xi.e. trouver itel que x∈[ai, ai+1]
◆Calculer
g(x) = gi(x) = mi+1 (x−ai)3
6hi+mi(ai+1−x)3
6hi+ui(x−ai) + vi
Introduction
Interpolation de LAGRANGE
Spline Cubique
Définition
Étude de g′′
Étude de g
Étude de g′
Cas des points réguliers
Algorithme
Exemple
Régression linéaire
Introduction - p. 24/42
Exemple

Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Régression linéaire - p. 25/42
Régression linéaire
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 26/42
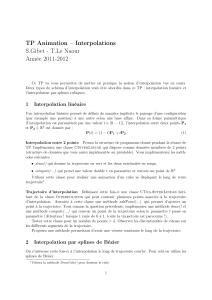
Problème de lissage
0
1
2
3
4
0 1 2 3 4
On a une famille de points du plan (xi, yi)1≤i≤met on cherche à
approcher cette famille par une fonction f.
■polynôme d’interpolation : minimisation de l’erreur sur les points
d’interpolation pas sur les autres
■Spline cubique : fonction complexe et seulement C2
■approximation au moindres carrés par une famille de fonctions :
minimisation de l’erreur générale.
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 27/42
Le problème
On a :
■une famille de points (xi, yi),i= 1,...,m
■une famille de fonctions φjj= 1,...nlinéairement
indépendantes (n≤m)
et on cherche la fonction de la forme
φ=
n
X
j=1
ujφj
telle que la suite (φ(xi))i=1,...,m représente au mieux la suite
(yi)i=1,...,m c’est à dire qui minimise :
f(u) =
m
X
i=1
(φ(xi)−yi)2
On parle alors de lissage ou de régression
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 28/42
■C’est un système avec ndegrés de liberté et mcontraintes.
◆En général, m > n.
◆Il n’y a pas de résultat exacte.
◆C’est une méthode d’approximation.
■On trouve toujours une solution.
◆En générale la fonction φne passe pas par les points.
◆On trouve la solution la moins mauvaise.
■Minimisation de l’erreur générale
◆On doit connaître le comportement de la fonction représentée
◆Lissage du bruit
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 29/42
Formulation matricielle
Soit la matrice rectangulaire A∈ Mm,n(IR) et le vecteur ydéfinis
par :
A=
φ1(x1)φ2(x1)... φn(x1)
φ1(x2)φ2(x2)... φn(x2)
.
.
..
.
..
.
..
.
.
φ1(xm)φ2(xm)... φn(xm)
et y=
y1
y2
.
.
.
ym
On cherche alors à minimiser la fonction :
f(u) = kAu −yk2
C’est ce qu’on appelle problème des moindres carrés.
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 30/42
Projection orthogonale
Si udécrit l’espace vectoriel IRn, alors, Au décrit Im(A).
On cherche ¯uqui minimise kAu −ykdonc A¯uest le projeté
orthogonal de ysur Im(A):
y=A¯u+v
Avec v∈ Im(A)⊥
Soit aila iecolonne de la matrice A, alors ∀i∈ {1,...,n}
hai, yi=hai, A¯ui+hai, vi
=taiA¯u
Donc ¯uest un vecteur tel que :
tAA¯u=tAy
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 31/42
Équation normale
Inversement, tout vecteur ¯utel que
tAA¯u=tAy
minimise la norme : kA¯u−yk
En effet, si tAAu =tAy =tAA¯ualors :
tAAu −tAA¯u= 0
tAA(u−¯u) = 0
u−¯u∈ Ker(tAA)
Or Ker(tA) = (Im(A))⊥, donc u−¯u∈ Ker(tAA)implique
u−¯u∈ Ker(A)
Donc Au =A¯u
kAu −yk=kA¯u−yk
Cette équation est appelée équation normale
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 32/42
Remarques
Soit A∈ Mm,n(IR),n≤malors
■L’équation normale tAAu =tAy admet toujours au moins une
solution.
◆pour toute matrice Mon a :
Ker(tM) = (Im(M))⊥et Ker(tMM ) = Ker(M).
◆Donc, tAy ∈(Ker(A))⊥.
◆Et (Ker(A))⊥= (Ker(tAA))⊥
=Im(t(tAA))
=Im(tAA).
◆Donc tAy ∈ Im(tAA)et l’équation admet une solution.
■Si rang(A) = n, la solution est unique.
◆Car Ker(A) = {−→
0}

Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 33/42
Cas des matrices inversibles
Si Aest une matrice carrée (m=n) et que Aest de rang n.
■Alors Aest inversible,
■Le système
Au =y
a une solution ¯uunique.
■Il suffit donc de calculer :
¯u=A−1y
par une méthode de résolution de système linéaire
■¯uminimise kAu −ykcar Au −y=−→
0
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 34/42
Cas des matrices orthogonales
Revenons au cas où n≤m, si les colonnes de la matrice Asont
orthonormées, c’est à dire si ∀i, j ∈ {1,...,n}2
taiaj=δij (δij = 0 si i6=jet δii = 1)
Cela signifie que
tAA =Inn
Alors le calcul de ¯uest simple :
tAA¯u=tAy
¯u=tAy
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 35/42
Cas des matrices triangulaires
Si Aest une matrice triangulaire de rang n:
A=
R
Alors posons
■y= c
d!où cest le vecteur formé des npremières
coordonnées de yet dcelui formé par les m−nsuivantes.
■R∈ Mn,n(IR) la matrice carrée triangulaire supérieure formée
par les npremières lignes de A.
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 36/42
Cas des matrices triangulaires (suite)
Quel que soit le choix de u, les m−ndernières coordonnées de
Au seront nulles, donc
kAu −yk2=kRu −ck2+kdk2
■Minimiser la valeur kAu −ykrevient à minimiser la valeur
kRu −ck
■Si Aest de rang n, alors Rest inversible.
■On peut donc trouver ¯utel que Ru =c, car on dans le cas d’une
matrice carrée inversible.
■La valeur minimisant cette norme est u=R−1c.
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 37/42
Cas général
Dans le cas général, An’est pas orthogonale ni triangulaire.
Par contre si Aest de rang n, il est possible de décomposer la
matrice Aen le produit de deux matrices :
■une matrice carrée orthogonale Q∈ Mmm
■une matrice triangulaire R∈ Mmn de rang n.
A=
Q
R
r11
r22
...
rnn
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 38/42
Cas général (suite)
Qest une matrice orthogonale donc elle ne modifie par la norme :
∀v∈IRm,
kQvk=ptvtQQv
=√tvv
=kvk
En particulier,
kQRu −yk=ktQQRu −tQyk
=kRu −tQyk
où Rest une matrice triangulaire de même rang que A.
On se ramène alors au problème précédant.
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 39/42
La méthode
Soient m≥n,A∈ Mmn et Yun vecteur de IRm. Pour chercher u
tel que usoit le vecteur qui mminimise
kAu −Yk
■On décompose Aen Q∈ Omm (orthogonale) et R∈ Mmn
(triangulaire supérieure);
■on calcule Z=tQY ;
◆les npremières lignes de Zforment le vecteur cqui est le
projeté orthogonale de Ysur Im(A);
◆les m−ndernières lignes de Zforment le vecteur d;
◆les npremières lignes de Rforment la matrice S, qui est
triangulaire supérieure;
■on calcule usolution du système linéaire Su =c;
■alors uest solution du problème des moindres carré et l’erreur
kAu −Yk=kdk
Introduction
Interpolation de LAGRANGE
Spline Cubique
Régression linéaire
Problème de lissage
Le problème
Formulation matricielle
Projection orthogonale
Équation normale
Remarques
Cas des matrices inversibles
Cas des matrices orthogonales
Cas des matrices triangulaires
Cas des matrices triangulaires
(suite)
Cas général
Cas général (suite)
La méthode
Exemple
Moindres carrés
Conclusion
Introduction - p. 40/42
Exemple
Trouver la parabole qui passe au plus près des points (−4,3)
,(−1,−3) ,(0,−1) ,(1,3) ,(2,9)
 6
6
1
/
6
100%