Chapitre4

Chapitre 4
Energie potentielle et Energie
m´ecanique
4.1 Condition d’existence
Pour commencer, nous consid`ererons le cas d’un syst`eme constitu´e de deux points mat´eriels M1et
M2dont l’interaction `a distance est d´ecrite par les vecteurs forces
−→
F1=−→
FM1/M2, et −→
F2=−→
FM2/M1=−−→
F1
Lorsque les deux points mat´eriels M1et M2subissent des d´eplacements infinit´esimaux
−→
dM1=dx1
−→
ex+dy1
−→
ey+dz1
−→
ez
et
−→
dM2=dx2
−→
ex+dy2
−→
ey+dz2
−→
ez
respectivement, le travail total (infinit´esimal) d´evelopp´e par ces forces int´erieures au syst`eme est
wint
tot =−→
F1·−→
dM1+−→
F2·−→
dM2
soit, explicitement, en fonction des composantes cart´esiennes des forces et des d´eplace- ments infi-
nit´esimaux
wint
tot =F1xdx1+F1ydy1+F1zdz1+F2xdx2+F2ydy2+F2zdz2
Cette expression est ce qu’on appelle une forme diff´erentielle. Ici, il s’agit d’une forme diff´erentielle
relativement aux six variables que sont les coordonn´ees x1, y1, z1, x2, y2, z2des deux points M1et
M2(les composantes des forces en d´ependent) et `a leurs diff´erentielles dx1, dy1, dz1, dx2, dy2, dz2.
On dit qu’un tel syst`eme poss`ede une ´energie potentielle s’il existe une fonction Ep(x1, y1, z1, x2, y2, z2)
des coordonn´ees des points mat´eriels en interaction telle que le travail ´el´ementaire wint
tot d´evelopp´e
par les forces int´erieures lors de d´eplacements infinit´esimaux de leurs points d’application respectifs
puisse s’´ecrire comme l’oppos´e de la diff´erentielle de cette fonction, qui est la partie principale de sa
variation cons´ecutive `a ces d´eplacements :
wint
tot =−dEp
Cette fonction Ep(x1, y1, z1, x2, y2, z2), si elle existe, est appel´ee ´energie potentielle du syst`eme
consid´er´e. Elle d´ecrit enti`erement les interactions entre les points mat´eriels constituant le syst`eme.
Les forces int´erieures se d´eduisent notamment de cette fonction par des d´erivations partielles. On dit
alors qu’elles d´erivent d’une ´energie potentielle. On a ainsi, dans le cas pr´esent
89

Chapitre 4. Energie potentielle et Energie m´ecanique
F1x=−∂Ep
∂x1
,F1y=−∂Ep
∂y1
,F1z=−∂Ep
∂z1
et
F2x=−∂Ep
∂x2
,F2y=−∂Ep
∂y2
,F2z=−∂Ep
∂z2
Ecrivons maintenant les conditions n´ecessaires et suffisantes `a l’existence d’une telle fonction. Pour
ne pas alourdir l’expos´e, nous omettrons de mentionner les in´evitables conditions math´ematiques de
r´egularit´e (d´erivabilit´e, continuit´e) des fonctions mises en jeu et admettrons le r´esultat suivant. Les
conditions n´ecessaires et suffisantes pour qu’une forme diff´erentielle `a nvariables
D=A1(u1,···, un)du1+A2(u1,···, un)du2+···An(u1,···, un)dun
soit la diff´erentielle d’une fonction F(u1,···, un)(c’est-`a-dire D=dF ) sont les n(n−1)
2relations
∂Ai
∂uj
=∂Aj
∂ui
, avec 1≤i < j ≤n
S’il en est ainsi, on dit que la forme diff´erentielle Dest une forme diff´erentielle totale exacte.
Insistons ici sur le fait que s’il existe une fonction ´energie potentielle, celle-ci ne d´epend que des
coordonn´ees des points mat´eriels en interaction et en aucun cas des vitesses. On peut mˆeme ˆetre plus
pr´ecis concernant la d´ependance vis-`a-vis des coordonn´ees. En effet, d’apr`es le principe de l’action et
de la r´eaction, on a −→
F1=−−→
F2, et par suite
wint
tot =−→
F2·−→
dM1M2=F2xd(x2−x1) + F2y(dy2−dy1) + F2z(dz2−dz1)
ce qui montre qu’en fait, s’il existe une ´energie potentielle, celle-ci ne d´epend des coordonn´ees des
parties en interaction que par l’interm´ediaire des coordonn´ees relatives xi−xj.
Ces r´esultats se transposent directement `a des syst`emes complexes de npoints mat´eriels en interaction,
et mˆeme `a des syst`emes mod´elisables comme des milieux continus.
De fait, pour de tels syst`emes, on admet couramment l’existence d’une ´energie potentielle d´ecrivant
l’interaction `a distance des constituants ´el´ementaires.
4.2 Exemples
4.2.1 Cas des forces centrales
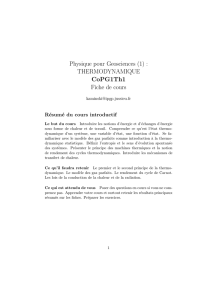
Deux points mat´eriels M1et M2exercent l’un sur l’autre une force centrale si celle-ci
♠est port´ee par la droite M1M2,
♠et si son intensit´e ne d´epend que de la distance r=M1M2.
Son expression g´en´erale est donc de la forme
−→
FM1/M2=f(r)−→
u12
o`u −→
u12=−→
M1M2/r est le vecteur unitaire port´e par −→
M1M2. Lorsque M1et M2subissent des
d´eplacements infinit´esimaux −→
dM1et −→
dM2respectivement, le travail total (infinit´esimal) d´evelopp´e
par les forces int´erieures est
wint
tot =−→
FM1/M2·−→
dM1M2=f(r)−→
u12 ·−→
dM1M2
Puisque −→
M1M2=r−→
u12, on a
Christian Carimalo 90 LP101 Mati`ere et Energie

Chapitre 4. Energie potentielle et Energie m´ecanique
d−→
M1M2=dr −→
u12 +r d −→
u12
Mais comme −→
u2
12= 1 (vecteur unitaire), on a aussi
d−→
u2
12 = 2 −→
u12 ·d−→
u12 = 0
ce qui signifie que d−→
u12 est orthogonal `a −→
u12. On en d´eduit
wint
tot =f(r)dr
O
xy
z
M1
M2
dM1u12
d M2
F1/2 = f(r) u12
r
F2/1 = − F1/2 (action/reaction)
(forces centrales)
Figure 4.1
Cette derni`ere expression est une forme diff´erentielle `a une seule variable r. En admettant, pour les
fonctions utilis´ees en Physique, le r´esultat math´ematique selon lequel une fonction d’une variable
poss`ede toujours une primitive, il est manifeste que l’on pourra introduire ici une fonction Ep(r), telle
que
dEp
dr =−f(r)
de sorte que
wint
tot =−dEp
Ainsi, un tel syst`eme poss`ede une ´energie potentielle. Cette derni`ere ne d´epend des coordonn´ees
x1, y1, z1de M1et x2, y2, z2de M2que par l’interm´ediaire de la distance r=M1M2
r=p(x1−x2)2+ (y1−y2)2+ (z1−z2)2
et l’on a
³−→
FM1/M2´x=−∂Ep
∂x1
,³−→
FM1/M2´y=−∂Ep
∂y1
,³−→
FM1/M2´z=−∂Ep
∂z1
³−→
FM2/M1´x=−∂Ep
∂x2
,³−→
FM2/M1´y=−∂Ep
∂y2
,³−→
FM2/M1´z=−∂Ep
∂z2
c’est-`a-dire que les deux forces int´erieures −→
FM1/M2et −→
FM2/M1=−−→
FM1/M2d´erivent de la mˆeme
fonction ´energie potentielle Ep(r). C’est un r´esultat important qu’il faut retenir.
Christian Carimalo 91 LP101 Mati`ere et Energie

Chapitre 4. Energie potentielle et Energie m´ecanique
4.2.2 Syst`eme de deux charges en Electrostatique
On a ici
−→
F1/2=q1q2
4π²0
−→
u12
r2
soit
f(r) = q1q2
4π²0
1
r2=−dEp
dr
On en d´eduit par int´egration
Ep(r) = q1q2
4π²0
1
r+ constante
La g´en´eralisation `a un syst`eme quelconque de Ncharges ponctuelles en interaction est imm´ediate.
Un tel syst`eme poss`ede une ´energie potentielle ayant pour expression
Ep(x1, y1, z1,···, xN, yN, zN) = X
i6=j
qiqj
4π²0
1
rij
+ constante
o`u
rij =p(xi−xj)2+ (yi−yj)2+ (zi−zj)2
Comme attendu, elle ne d´epend des coordonn´ees que par l’interm´ediaire des coordonn´ees relatives
xi−xj.
4.2.3 Syst`eme de deux masses en Gravitation
On a ici
−→
F1/2=−Gm1m2
r2
−→
u12
En suivant le mˆeme raisonnement qu’au paragraphe pr´ec´edent, on obtient ici l’´energie potentielle de
gravitation de deux masses ponctuelles en interaction sous la forme
Ep(r) = −Gm1m2
r+ constante
et, pour un syst`eme de Nmasses ponctuelles en interaction, l’´energie potentielle de gravitation
Ep(x1, y1, z1,···, xN, yN, zN) = −X
i6=j
Gmimj
rij
+ constante
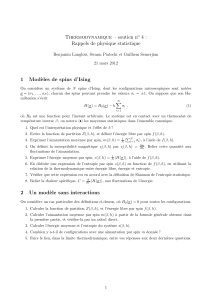
4.2.4 Le pendule simple
On ´etudie ici une situation particuli`ere du cas pr´ec´edent, concernant l’interaction gravitationnelle entre
la masse maccroch´ee au bout du fil du pendule et la Terre. On sait que si l’on mod´elise la Terre
comme une boule de centre Cet rayon Rdans laquelle les masses sont uniform´ement r´eparties, elle
peut ˆetre consid´er´ee depuis un point `a l’ext´erieur comme une masse ponctuelle plac´ee en C, dont la
masse est la masse totale MTde la Terre. L’interaction entre la Terre et la masse msera alors d´ecrite
par l’´energie potentielle
Ep(r) = −GMTm
r+ constante
o`u r=CM. Notant hl’altitude de la masse m, on a r=R+het comme h¿R, il vient
Christian Carimalo 92 LP101 Mati`ere et Energie

Chapitre 4. Energie potentielle et Energie m´ecanique
1
r=1
R(1 + h/R)≈1
Rµ1−h
R¶
d’o`u
Ep(r) = Ep(h) = mgh + constante
avec g=GMT
R2. La constante peut ˆetre ajust´ee de telle sorte que l’´energie potentielle soit nulle
lorsque le pendule est selon la verticale (qui, dans le mod`ele propos´e ici, co¨ıncide avec la direction
radiale CM). Si h0est l’altitude correspondante de m, on aura alors
Ep(h0) = 0 = mgh0+ constante, donc constante = −mgh0
et par suite
Ep(h) = Ep(z) = mg(h−h0) = mgz
en posant z=h−h0.
l
O
z = 0
z
M (masse m)
m g
θ
l
Figure 4.2
On peut retrouver directement cette expression de la fa¸con suivante. Lors d’un d´eplacement infi-
nit´esimal −→
dM=dx −→
ı+dy −→
+dz −→
kde la masse m, son poids −→
P=−mg −→
kproduit le travail
´el´ementaire
w=−→
P·−→
dM=−m g dz
Manifestement, ce travail peut ˆetre r´e´ecrit comme la diff´erentielle totale exacte −d(mgz)et l’on peut
dire que le poids de la masse md´erive de l’´energie potentielle
Ep(z) = mgz + constante
Comme pr´ec´edemment, la constante peut ˆetre ajust´ee de telle sorte que Ep(0) = 0, et l’on obtient
ainsi Ep(z) = mgz.
Il est utile de donner ici l’expression de l’´energie potentielle en fonction de l’angle θentre le fil du
pendule et la verticale. On a (voir figure) z=`−`cos θ, d’o`u
Ep(z) = Ep(θ) = mg` (1 −cos θ)
Christian Carimalo 93 LP101 Mati`ere et Energie
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%