rachis et commandes musculaires spine and muscular

Rachis, 1995, vol. 7, nO 3pp 123-128
RACHIS ET COMMANDES MUSCULAIRES
SPINE AND MUSCULAR COMMANDS
M. DIETRICH, K. KEDZIOR, T. ZAGRAJEK
BIOMÉCANIQUE
Université Technologique de Varsovie, Institut de l'Aéronautique et de Mécanique Appliquée, Varsovie, Pologne.
Ecole Polytechnique de Varsovie.
La majeure partie des modèles biomécaniques du corps
humain sont fragmentaires. Ces modèles supposent généra-
lement que le corps humain est composé d'éléments rigides
(segments corporels ou os) et que les muscles, en tout ou
partie, sont des ressorts unidimensionnels (2,4,5). Ils ne per-
mettent donc pas de déterminer la répartition des tensions à
travers les tissus mous de l'organisme humain, alors même
qu'il s'agit d'un élément essentiel de l'évaluation des
risques pathologiques associés aux comportements.
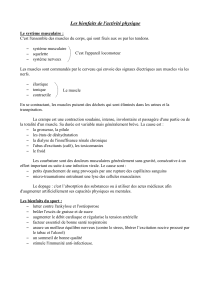
Le modèle présenté ici (figure 1) envisage le torse humain
comme un ensemble tridimensionnel composé d'éléments
rigides (os, vertèbres) et d'éléments déformables (muscles,
ligaments, disques intervertébraux). Les muscles sont en
outre considérés comme des générateurs actifs de la force
de contraction. Ce modèle est une version sensiblement
améliorée de celui présenté en (3). Il est basé sur 2640 élé-
ments finis et le modèle mathématique correspond à 13107
équations non linéaires. Les données utilisées pour
construire le modèle consistent en des paramètres corporels
géométriques et des forces externes (comme la charge de
travail statique ou dynamique (1») résultant de la tâche que
doit accomplir le sujet modélisé dans le cadre de diverses
configurations impliquant tel ou tel positionnement des
segments corporels. Le déplacement des éléments rigides et
les profils de déformation et de contrainte au niveau des
éléments flexibles (tissus mous) sont ensuite déterminés au
moyen d'une analyse linéaire ou non linéaire. L'analyse
123
linéaire implique la linéarisation des équations non
linéaires pour la configuration rachidienne étudiée.
Notre objectif ici est de présenter ce modèle dans une appli-
cation concrète, celle de résoudre le problème de la coopé-
ration des muscles dans le fonctionnement du système
rachidien chez l'homme.
COOPÉRATION DES
MUSCLES RACHIDIENS
L'un des problèmes majeurs de la biomécanique consiste à
déterminer la façon dont le système nerveux central "com-
mande" les muscles pour que le système ostéomusculaire
réalise une tâche donnée. Ce problème ne peut être résolu
que par modélisation mathématique, dans la mesure où l'on
ne dispose pas à l'heure actuelle de méthodes fiables per-
mettant une mesure directe des forces musculaires en
oeuvre dans le corps humain. Le système ostéomusculaire
est statistiquement indéterminé (c'est-à-dire que le nombre
d'équations est insuffisant par rapport au nombre d'efforts
musculaires inconnus); c'est pourquoi l'on utilise souvent
la méthode de l'optimisation pour résoudre les problèmes
de coopération musculaire. On suppose alors que le systè-
me nerveux contrôle les muscles d'une "manière optimale
logique".

M. DIETRICH, K. KEDZIOR, T. ZAGRAJEK
Figure 1 :
Modélisation en éléments finis du système rachidien de l'homme
en orthostatisme :
a) vue d'ensemble,
b) section lombaire de la colonne vertébrale;
1 - colonne vertébrale, 2 - musculus erector spinae, 3 - muscle
psoas, 4 - muscles abdominaux, 5 - cage thoracique, 6 -
diaphragme, 7 - vertèbre Ll, 8 - ligament surépineux, 9 - ligament
jaune, 10 - muscle rotateur, Il - disque L2-L3 (seuls quelques
éléments sont indiqués).
Pour chaque cas étudié, deux critères d'optimisation ont été
utilisés afin de résoudre le problème de la coopération mus-
culaire, Il s'agit du critère énergétique (3) qui est représenté
par l'équation suivante:
et du critère de saturation progressive ("soft saturation") (6)
représenté par l'équation suivante:
où:
k= nombre d'actions musculaires (régions musculaires sti-
mulées de manière autonome)
(Ji = tension des fibres musculaires (si 2 0)
124
(Ja = tension musculaire admissible (estimée à l mPa dans
ce cas)
Vi =volume de la région musculaire
Ei = module de Young des fibres musculaires.
Les deux critères peuvent être considérés comme
"logiques". Le critère (1) suppose que le système musculaire
réalise la tâche concernée au prix du travail minimal. Le
critère (2) prédit la mise en oeuvre, en cas de charges
externes faibles, d'à peu près les mêmes forces musculaires
que celles prévues par le critère (1) alors que pour les
charges externes importantes proches des limites physiolo-
giques des performances humaines, il prévoit que tous les
muscles développent simultanément leur force maximale,
ce qui semble être le mode de coopération naturel des
muscles dans l'organisme.
Les résultats types présentés à partir de la figure 2 suppo-
sent que le corps est en debout (ou en station érigée). Le
poids de la partie supérieure du corps (le plan de séparation
a été situé entre L4 et L5) a été estimé à 300 N. Le poids
corporel est représenté par un système de forces concen-
trées appliquées à des noeuds d'éléments finis (20 000
points nodaux environ).
La charge externe symétrique de 2 x 200 N dans les deux
mains ou bien la charge externe asymétrique de l x 200 N
dans la main gauche ont été appliquées sous forme de
forces concentrées aux nœuds d'éléments finis situés autour
de l'omoplate, de manière symétrique ou asymétrique par
rapport au plan sagittal. On a supposé que la tension au
niveau du système musculaire contrebalance à la fois le
poids corporel et la charge externe et maintient le corps
en orthostatisme, la position du bassin restant constante.

RACfUS ET COMMANDES MUSCULAIRES
[....][11111 ]
-8.751
-9.879
•-7.398 •
-7.629
-6.838
Et
-6.177
l<i;l-4.678 ~ ...ir..
-4.727
--
-3.389 -3.276
•-1.949 •
-1.826
~-8.589 :s;i
-8.375
-.J "'
8.771 --
,1.876
tJ 2.132
!f;l
2.526•3.492 •
3,'377
"\
x\;1 a
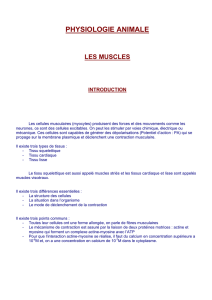
Figure 3:
Résultats théoriques : V - déplacements horizontaux des
apophyses épineuses dans le plan sagittal sous l'effet d'une
charge symétrique (2 x 200 N dans les deux mains) ou
asymétrique (1 x 200 N dans la main gauche), Z - hauteur du
tronc mesurée à partir de LS-S l, • - critère énergétique, • -
critère de saturation "progressive".
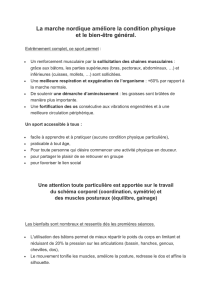
Figure 2:
Déplacement horizontal des côtes et des vertèbres dans le plan
sagittal sous l'effet d'une charge externe de 2 x 200 N dans les
deux mains,
a) pour le critère énergétique,
b) pour le critère de saturation "molle".
Sous l'effet d'une charge externe et d'une tension musculai-
re, le rachis subit une déformation avec déplacement des ver-
tèbres. Il faut maintenir le rachis en orthostatisme, en consi-
dérant qu'il n'y a pas déplacement horizontal de T3 dans le
plan sagittal.
L'exemple illustré par la figure 2 montre les déplacements
horizontaux (perpendiculaires au plan frontal) d'éléments
osseux (côtes et vertèbres) en cas de charge externe symé-
trique. Les résultats sont présentés en fonction des deux cri-
tères d'évaluation mentionnés ci -dessus. Les différentes
couleurs correspondent aux degrés de déplacement présen-
tés dans les tableaux, ceux-ci résultant de l'analyse linéaire.
On voit clairement que la charge externe provoque une
majoration des incurvations de la colonne vertébrale mais
que le système rachidien maintient le corps en position
stable et orthostatique.
La figure 3 compare les résultats de l'analyse en fonction
des deux critères d'évaluation et pour les deux types de
charge, symétrique et asymétrique. Elle montre qu'en ce
qui concerne les déplacements de la colonne vertébrale, les
deux critères d'évaluation (énergétique et de saturation
"progressive") génèrent les mêmes résultats, les différences
restant dans la marge d'erreur. Cela signifie que dans les
deux cas, il y a une même forme de stabilité statique.
300.0
200,0
100.0
-4.00
,
0.00
Vmm
125

RÉPARTITION DE LA TENSION
AU NIVEAU DES TISSUS MOUS
M. DIETRICH, K. KEDZIOR, T. ZAGRAJEK
sion sont toutes deux inférieures dans le cas du critère de
saturation "progressive" par rapport au critère énergétique.
On peut cependant parvenir au même état de stabilité par
différentes répartitions des contraintes au niveau des tissus
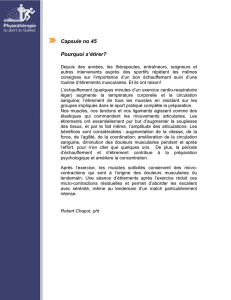
musculaires, Lafigure 4 présente les répartitions de tension
dans les fibres des muscles spinaux (musculus erector spi-
nae) provoquées par une charge externe symétrique en
fonction des deux critères d'évaluation, énergétique et de
saturation "progressive". L'exemple proposé montre que la
répartition de tension n'est pas la même dans les deux cas.
Pour le critère de saturation "progressive", l'importance des
contraintes maximales est moindre, la répartition des
contraintes est plus uniforme et on ne note pas de zones de
concentration des contraintes. Des résultats analogues ont
été obtenus en cas de charge asymétrique.
Lafigure 5 présente la distribution de pression le long de la
colonne vertébrale au niveau des nuclei pulposi et lafigure
6, la distribution des contraintes de compression au niveau
des anneaux fibreux des disques intervertébraux dans le cas
d'une charge externe symétrique et les compare en fonction
des deux critères d'évaluation. La valeur maximale des
pressions et la valeur maximale des contraintes de compres-
Figure 4:
Répartition de la tension des fibres musculaires des muscles
spinaux (musculus erector spinae) sous l'effet d'une charge
externe de 2 x 200 N dans les deux mains - vue de dos :
a) pour le critère énergétique,
b) pour le critère de saturation "progressive".
CONCLUSION
Les résultats présentés dans les figures 5et 6 ont été obte-
nus pour une charge externe très importante. Il en ressort
que dans le cas d'une telle charge, la coopération des
muscles selon le critère de saturation "progressive" donne
des résultats plus avantageux pour l'organisme, en sollici-
tant moins les tissus. Les résultats suggérent également que
le critère de saturation "progressive" implique une partici-
pation plus grande des muscles situés à distance de la
colonne vertébrale; les bras de levier des forces exercées
par ces muscles étant plus longs, ces forces (qui induisent
une compression des disques intervertébraux) sont moins
importantes au niveau du rachis.
Les résultats présentés nous permettent d'affirmer que le
système nerveux central contrôle le système musculaire de
la colonne vertébrale en prenant en compte la répartition de
la pression au niveau des tissus mous.
Remerciements
Cette étude a bénéficié du soutien du Comité d'Etat pour la
Recherche Scientifique, Varsovie, Pologne (subvention n°
3 P40l 02606).
•
U1Pal
m8.888E+88
"",,13 .SB0E-81
.·l 8.U18
6.158
8.288
8.258
8.388
8.358
8.888
a
126
[I1Pa]
.BBBE+8B
.58BE-01
6.186
6.158
13.288
13.258
8.3138
8.358
8.823
b

M. DIETRICH, K. KEDZIOR, T. ZAGRAJEK
UIPa,l
8.983
1.288
1.288
1.168
B.961
B.S88
8.751
B.747
b
Figure 5:
Répartition de la pression le long de la colonne vertébrale au
niveau des nuclei pulposi des disques intervertébraux sous l'effet
d'une charge externe de 2 x 200 N dans les deux mains:
a) pour le critère énergétique,
b) pour le critère de saturation "progressive".
BIBLIOGRAPHIE _
l - BOROWSKI S" DIETRICH M., KEDZIOR K.,
RZYMKOWSKI C., ZAGRAJEK T.
Modelling of dynamic loads acting upon the human-operator
musculoskeletal system, in :Travaux du Huitième Congrès
Mondial sur la Théorie des Machines et des Mécanismes.
Vol. 3, Société des Mathématiciens et Physiciens
Tchécoslovaques, Prague 1991,781.
2 - CHAFFIN D.B., ANDERS SON G,B,J,
Occupational biomechanics, John Willey and Sons.
New York 1991 (2e édition).
3 - Dietrich M., Kedzior K,Zagrajek T.
Modelling ofmuscle action and stability of the human spine,
ln: J.M. Winters and S.L-Y. Woo (eds), Multiple Muscle Systems:
Biomechanics and Muscle Organization. Springer-Verlag 1990,
451-460.
4 - McGILL S.M., NORMAN RW.
Low back biomechanics in industry :the prevention of injury
through safer lifting.
ln: Grabiner M.D. (ed.), CUITent issues in biomechanics, Human
Kinetics Publishers, Champaign, Illinois, 1993,69.
5 - SEIREG A., ARVlKAR R
Biomechanical analysis of the musculoskeletal structure for
medicine and sports.
Hemisphere Pub. Co., New York 1989.
Figure 6:
Répartition des contraintes compressives au niveau des anneaux
fibreux du disque intervertébral L5-S1 sous l'effet d'une charge
externe de 2 x 200 N dans les deux mains :
a) pour le critère énergétique,
b) pour le critère de saturation "progressive".
6 - SIEMENS KI A.
Soft saturation, an ide a for loud shuring befween muscles -
application ta the study of human locomotion,
ln : Cappozzo A., Marchetti M., Tosi V. (eds), Biolocomotion: a
century of research using moving pictures, Promograph, Roma,
1992,293.
128
1
/
5
100%