Ordre d`Isolement

Mathieu Rossat 1
Ordre d’Isolement
Dans le cas de systèmes mécaniques complexes faisant intervenir plusieurs solides, il est parfois
difficile de choisir l’ordre le plus efficace dans lequel isoler.
Vous trouverez dans ce document la méthode que j’ai mise en place afin de déterminer cet ordre. Elle
fonctionne dans 95 % des cas. Les 5% restants étant généralement le cas de problèmes pour lesquelles
certaines des six équations de la statique ne sont pas utilisables. Ces cas-là ne seront pas étudié en
DUT et Licence Pro.
Ma méthode est basée sur le graphe de liaisons.
Remarque 1 : L’ordre dans lequel isoler n’est pas unique. Plusieurs cheminements permettent d’arriver
au même résultat.
Remarque 2 : Un système soumis à deux forces coupe deux traits. Dans le cas des systèmes à 3
inconnues, il faut compter le nombre d’inconnue associé aux traits coupés.
1•Choisir la phase de fonctionnement du système
2•Regrouper les pièces en classe d'équivalence
3•Tracer le graphe de liaisons
4
•Définir le nombre d'inconnues pour chaque liaison (2D ou 3D selon le problème)
•Tracer sur le graphe de liaison les efforts appliqués sur le système
5
•Identifier les systèmes soumis à 2 forces : 2 traits coupés
•Choisir un de ces sytèmes
6
•Simplifer le graphe de liaison (Seule inconnue : l’intensité)
•Reprendre à l'étape 5 tant qu'il reste des systèmes soumis à deux forces
7
•Identifier les systèmes à 3 inconnues maxi (Problème plan) ou 6 inconnues maxi (Problème 3D)
•Choisir un de ces systèmes
8
•Simplifer le graphe de liaison
•Reprendre à l'étape 7 tant qu'il reste des inconnues sur le graphe de liaisons

Mathieu Rossat 2
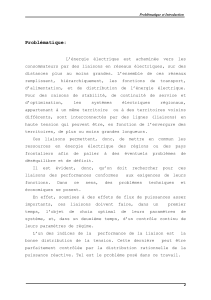
Passerelle de maintenance
La structure de la figure ci-contre est chargée sur les barres
1 et 4 par une charge uniformément répartie en . Le
problème est plan. Le poids propre de chaque poutre est
négligé.
Calculez les actions aux appuis et , et celles dans les
liaisons pivots d’axe aux points et .
Graphe de liaisons (+ nombre d’inconnue dans le plan) :
Stratégie d’isolement :
Système soumis à 2 efforts : {2} et {3} Seules inconnues dans chaque cas : l’intensité.
Pivots passent de 2 à 1 inconnue par liaison.
Système à 3 inconnues maxi : {1}, {1+2+3} et {1+2+3+4} (Itération 1)
Choix : Par exemple {1}
Système à 3 inconnues maxi : {4}, {2+4}, {3+4}, {2+3+4} et {1+2+3+4} (Itération 2)
Choix : Par exemple {1+2+3+4} (Avantage : Indépendant des résultats précédents)

Mathieu Rossat 3
Récapitulatif sur l’ordre des isolements :
1. {2}
2. {3}
3. {1}
4. {1+2+3+4}
Système matériel isolé : SMI={2}
C’est un système matériel isolé soumis à 2 forces. Les forces ont la même direction, la même intensité
et un sens contraire. La seule inconnue est l’intensité :
Système matériel isolé : SMI={3}
C’est un système matériel isolé soumis à 2 forces. Les forces ont la même direction, la même intensité
et un sens contraire. La seule inconnue est l’intensité :
Système matériel isolé : SMI={1}
Bilan des Actions Mécaniques Extérieures (B.A.M.E.) :
On applique le Principe Fondamental de la Statique (P.F.S.)
Somme des moments en A autour de :
Somme des forces sur :

Mathieu Rossat 4
Système matériel isolé : SMI={1+2+3+4}
Bilan des Actions Mécaniques Extérieures (B.A.M.E.) :
On applique le Principe Fondamental de la Statique (P.F.S.)
Somme des moments en A autour de :
Somme des forces sur :

Mathieu Rossat 5
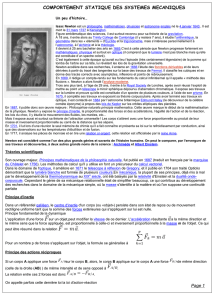
Potence de manutention – (Ordre d’isolement seulement)
La figure ci-desous représente une potence de manutention. L’utilisation d’un palan (considéré fixe
dans la phase de fonctionnement) au point génère une force
. On néglige le poids propre des
barres devant le chargement. Les liaisons en et sont des pivots d’axe . La liaison en E est une
linéaire annulaire d’axe . La liaison en est une rotule. Toutes les liaisons sont supposées parfaites.
Le problème est plan.
Déterminez l’ordre dans lequel isoler.
 6
6
1
/
6
100%