Le réseau de Kohonen

LE RESEAU DE KOHONEN
Apprentissage dans le cas où la fonction de voisinage est une gaussienne
Réalisé par: (TADG5)
Bouthayna Ed-Dahmouni
Adil Bouchana
Naoufal El Issaoui
Abdelmoughit Idrissi Badssi
Encadré par :
Mme A.Majda

Table des matières
1- Présentation ........................................................................................................................................................................ 2
2- Mécanisme d’apprentissage ......................................................................................................................................... 2
Des neurones spécialisés : ............................................................................................................................................. 2
Interaction latérale entre neurones........................................................................................................................... 2
3- Synthèse générale ............................................................................................................................................................. 2
4- Algorithme d’apprentissage d’une carte de Kohonen ........................................................................................ 3

1- Présentation
La carte topologique auto-adaptative de Kohonen, également appelée " Self-Organizing Map " ( SOM
) est un réseau à compétition. Cette carte permet de représenter sur un petit nombre de dimensions la
structure présente dans des données de haute dimensionnalité. C’est une technique de pré-traitement
fort utile car il permet de diminuer l’espace de représentation. La carte topologique est composée
essentiellement d'une couche compétitive de neurones de sortie. Ces neurones sont alimentés par une
couche de neurones d'entrée. La règle d'apprentissage de la carte est non supervisée.
2- Mécanisme d’apprentissage
Kohonen s'est basé sur des observations biologiques concernant la spécificité du rôle joué par
certains neurones ainsi que les mécanismes d'interactions entre neurones.
Des neurones spécialisés :
D'après des études neuro-biologiques, certaines cellules nerveuses ont des rôles bien spécifiques
dans les systèmes de perception. Kohonen en retire donc l'idée de créer un réseau tel que chacun des
neurones qui le composent, réponde d'une manière spécifique à un type de stimulus. Il appelle ce réseau
"réseau à réponses localisées".
Prenons un exemple simple. Dans la reconnaissance de caractères, chaque neurone correspondra à un
caractère de l'alphabet.
Interaction latérale entre neurones
Il a été montré qu'entre les neurones qui recevaient les signaux des cellules réceptrices, il existait
un mécanisme d'interaction latérale qui dépendait de la distance entre les neurones concernés. Dans
une zone latérale proche du neurone vainqueur, les neurones qui lui sont connectés ont une action
excitatrice; dans un voisinage plus lointain, leur action est inhibitrice; l'action des neurones les plus
éloignés est négligeable.
Plutôt que d'entraîner uniquement le neurone vainqueur, tous les neurones dans le voisinage étendu
du neurone vainqueur ont le droit à un apprentissage.
3- Synthèse générale
Chaque cellule du réseau doit correspondre à un stimulus spécifique;
L'interaction latérale entre les neurones doit provoquer la formation d'amas de neurones excités
autour du neurone le plus activé par le stimulus;

Pour aboutir à un tel réseau, la règle d'apprentissage proposée par Kohonen se décompose en deux
étapes :
sélection du neurone qui correspondra à un type de signal d'entrée donné;
augmentation de l'activation de ce neurone et du groupe de neurones qui l'entoure lorsque ce
signal d'entrée est présenté, ce qui revient à accroître la correspondance entre ce neurone et son
voisinage avec le signal d'entrée considéré.
4- Algorithme d’apprentissage d’une carte de Kohonen
Le modèle des cartes topologiques est inspiré d’une structure neuronale présente dans certaines
aires corticales. Les neurones sont organisés en couches, et, à l’intérieur de chaque couche, chaque
neurone émet des connexions excitatrices vers ses voisins les plus proches, et des connexions inhibitrices
vers les neurones plus éloignés. Tous les neurones reçoivent les mêmes entrées.
Les principaux paramètres de ce modèle sont: le nombre de neurones, le maillage des unités de la
carte, la topologie de la carte, tore ou plane le taux d'apprentissage, le voisinage, et les fonctions qui
déterminent sa décroissance dans l'espace et dans le temps, le rayon de propagation, le nombre
d'itérations, le nombre de phases d'apprentissage.
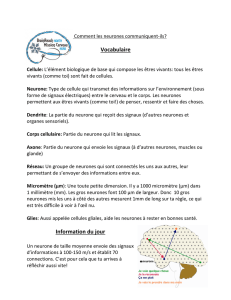
Kohonen a simulé le comportement de ce type de structure, et a montré qu’il peut être approximé
par l’algorithme suivant :
Avec
W(0) le vecteur poids à l’instant t=0
ητ est le taux d’apprentissage final

η taux d’apprentissage
P(t) designe le stimulus d’apprentissage au temps t
Λ g(t) represente le voisinage au temps t
Cet algorithme consiste à échantillonner les stimuli d’apprentissage jusqu’à l’atteinte d’un certain
critère d’arrêt. Celui-ci est le plus souvent spécifié par un nombre maximum d’itération tmax mais peut
aussi tenir compte de la stabilité des poids. Par exemple, lorsque maxi ||∆iw|| < ε durant plusieurs
itérations, on peut décider arbitrairement de stopper l’apprentissage puisque le réseau modélise
suffisamment bien l’espace des entrées. A chaque itération, on détermine le neurone gagnant (le plus
proche) et on déplace celui-ci, ainsi que son voisinage actuel, dans la direction du stimulus courant en
utilisant le taux d’apprentissage courant.
Une variante que l’on peut aussi rencontrer consiste à remplacer l’équation de mise à jour des poids
par l’expression suivante :
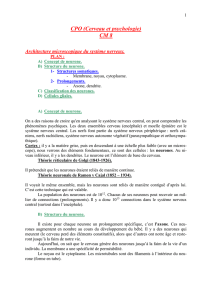
Où : vient remplacer le voisinage Λg par une fonction πi,g qui dépend de la
distance topologique di,g (en nombre d’arêtes dans la carte) entre le neurone i et le neurone gagnant g.
La fonction πi,g a une forme gaussienne telle qu’illustrée à la figure ci-dessous.
Figure 1 Fonction de voisinage gaussienne
Tout comme dans le cortex, les neurones sont reliés les uns aux autres, c'est la topologie de la carte.
La forme de la carte définit les voisinages des neurones et donc les liaisons entre neurones.
La fonction de voisinage décrit comment les neurones dans la proximité du vainqueur sont entraînés
dans le mouvement de correction et force les neurones qui se trouvent dans le voisinage de s à
rapprocher leurs vecteurs référents du vecteur d’entrée. Moins un neurone est proche du vainqueur
dans la grille, moins son déplacement est important.
 6
6
1
/
6
100%