Acétates cours #13a ()

01/12/14
1
Variateur électronique de vitesse
Comment changer la vitesse d’un
moteur
Guy Gauthier ing. Ph.D. (mars 2014)
Vitesse synchrone d’un moteur AC
•La vitesse synchrone d’un moteur AC est
dictée par la fréquence du réseau électrique.
•Elle est calculé comme suit:
–fp : fréquence du réseau en Hertz;
–n : nombre de paires d’enroulements par phase.
60 p
Synchone RPM
f
Nn

01/12/14
2
Vitesse synchrone d’un moteur AC
•Puisque la fréquence du réseau au Québec est
de 60 Hz, alors les vitesses synchrones sont:
–3600 RPM si n = 1;
–1800 RPM si n = 2;
–1200 RPM si n = 3;
–900 RPM si n = 4;
–720 RPM si n = 5;
–…
À 50 Hz:
-3000 RPM si n = 1;
-1500 RPM si n = 2;
-1000 RPM si n = 3;
-750 RPM si n = 4;
-600 RPM si n = 5;
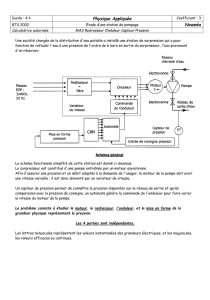
Vitesse d’un asynchrone moteur AC
•La vitesse d’un moteur asynchrone doit
pendre en compte le glissement S:
•La vitesse du rotor est inférieure à la vitesse
du champ tournant.
60 1
RPM p
f
NnS

01/12/14
3
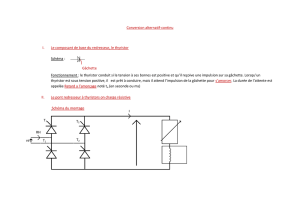
CHANGER LA VITESSE SANS
L’ÉLECTRONIQUE DE PUISSANCE…
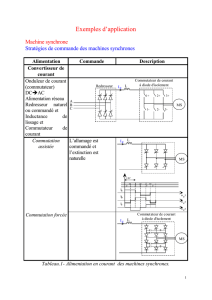
Changer le nombre de
paires de pôles n
•La vitesse de synchronisme d’un moteur
alimenté à 60 Hz et ayant 2 pôles (n = 1) est de
3600 RPM.
•Si le moteur possède 4 pôles (n = 2) cette
vitesse est divisée par 2 et devient 1800 RPM.
(moteur de type
Dahlander)

01/12/14
4
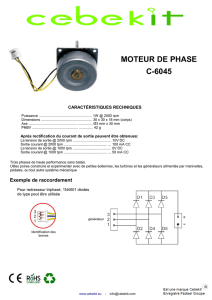
Contrôle du glissement S
•Pour changer la vitesse du moteur, on peut
jouer sur le glissement S de deux façons:
–Changer le voltage du stator;
–Contrôle du rotor:
•en changeant la résistance du rotor;
•par le couplage en cascade.
Changer le voltage au stator
•Le couple du moteur est
proportionnel au carré de la
tension d’alimentation au
stator vf.
•Donc, changer la tension
d’alimentation change la
vitesse en changeant la
position du point
d’opération.
2
2 2 2 2
fr
m
p r p r
pnv SR
TR S L

01/12/14
5
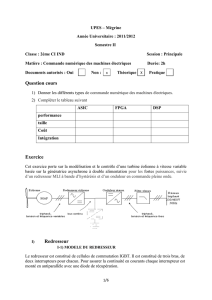
Changer la résistance au rotor
•Si le moteur est à rotor bobiné, on peut
insérer des résistances dans le circuit du rotor.
•La perte par effet Joule au rotor change la
caractéristique couple/vitesse.
R augmente
2
22 2 2
f r R
m
p r R p r
pnv S R R
TR R S L
CHANGER LA VITESSE EN UTILISANT
L’ÉLECTRONIQUE DE PUISSANCE
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
1
/
52
100%