Document - ePIphys

P.Aimé. 18/07/07
Calcul di¤érentiel/Di¤érentielles/Exemples de di¤éomorphismes/demo7.pdf
Enoncé
Les applications suivantes, de R2dans R2sont-elles des di¤éomorphismes ?
Si ce n’est pas le cas, préciser si l’on peut se restreindre à un ouvert conven-
able sur lequel on obtient un di¤éomorphisme de cet ouvert sur son image, et
interpréter les arcs transformés des droites parallèles aux axes, dont on donne
la représentation.
1. f1(x; y) = (exey; x +y)
2. f2(x; y) = (x2+y2;2xy)
3. f3(x; y) = (x2y2;2xy)
Solution
Dans tous les cas, on cherche un ouvert UR2sur lequel les trois hypothèses
du théorème d’inversion sont véri…ées :
-fest C1sur U, on sait que pour cela, il su¢ t que les dérivées partielles
soient continues, on écrit donc la matrice jacobienne en tout point de U. Rap-
pelons que ses colonnes sont les vecteurs dérivées partielles.
-fest injective sur U, donc bijective de Usur f(U)(si possible, on détermine
f(U), selon le théorème d’inversion, c’est un ouvert de R2),
- En tout point de U, la matrice jacobienne de fest inversible, en pratique
son déterminant est non nul.
1. (a) J(x;y)f1=exey
1 1 , les d.p. sont continues sur R2.
Soit (a; b)2R2. S’il existe (x; y)tel que
(exey; x +y) = (eaeb; a +b),
alors
y=a+bx
e2xexeaebea+b= 0.
Le changement de variable X=ex, et la résolution de l’équation du
second degré en Xmontrent qu’il existe une soution unique (sachant
que X > 0), f1est donc injective.
En…n det J(x;y)f1=ex+ey6= 0.
En conclusion, f1est un C1-di¤éomorphisme de R2sur f1R2.
On peut préciser que f1R2=R2, sachant que pour tout (; )2
R2, l’équation (exey; x +y) = (; )possède une solution (d’après
le raisonnement qui conduit à l’injectivité).
1

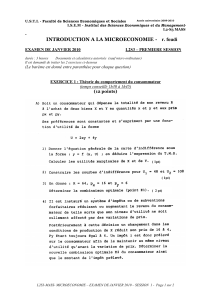
(b) L’arc image d’une droite verticale x=a, paramétrée par y, est
paramétré par
(y) = (X; Y ) = (eaey; a +y).
Les points de appartiennent donc à la courbe d’équation cartésienne
Y=a+ln (eaX). En se limitant à la famille des segments compris
entre [A; B]et [C; D]sur la …gure ci-dessous, cela donne les courbes
en rouge.
(c) L’arc image d’une droite horizontale y=b, paramétrée par x, est
paramétré par
(x) = (X; Y ) = exeb; x +b.
Les points de appartiennent donc à la courbe d’équation cartésienne
Y=b+ln eb+X. En se limitant à la famille des segments compris
entre [A; B]et [C; D]sur la …gure ci-dessous, cela donne les courbes
en bleu.
2. Pour les exemples 2,3,4 la méthode est analogue, bien qu’il soit parfois
intéressant de permuter l’ordre des véri…cations.
(a) J(x;y)f2=2x2y
2y2x, les d.p. sont continues sur R2.
det J(x;y)f2= 4 x2y2. On se restreint donc à l’un des quatre
quarts de plans ouverts bordés par les droites jxj=jyj. Par exemple
U1, dé…ni par x2> y2et x > 0, les autres étant notés Ui,i= 2;3;4,
et =
4
[
i=1
Ui.
Traitons simultanément les questions d’injectivité et de surjectivité,
c’est à dire le système
(x2+y2;2xy) = (u; v).
2

où (u; v)2R2est donné.
- Si (u; v) = 0, la seule solution est (x; y) = (0;0) =2.
- Si u < 0, un point (u; v)n’a pas d’antécédent.
- Si v= 0,u > 0, le point (u; v)possède quatre antécédents (0;pu),
(pu; 0) donc un seul dans chacun des ouverts Ui.
- Si u2> v2et u > 0, le point (u; v)possède quatre antécédents
x=pupu2v2,y=v
2x, qui appartiennent à (véri…er que
x2=y2est exclu), répartis sur le cercle x2+y2=u, de rayon pu,
les arguments sont de la forme ,+,
2,
2, il y a donc
un un seul dans chacun des ouverts Ui.
- Si u2< v2, un point (u; v)n’a pas d’antécédent.
En conclusion, la restriction de f2à chacun des ouverts Uiest un
C1-di¤éomorphisme de Uisur f2(Ui) = V,Vétant le secteur ouvert
dé…ni par u2> v2,u > 0.
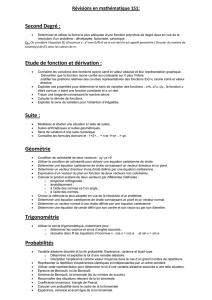
(b) L’arc image d’un segment de droite vertical x=a > 0,y2< a2,
inclus dans U1, paramétrée par y, est paramétré par
(y) = (X; Y ) = a2+y2;2ay.
Les points de appartiennent donc à la courbe d’équation cartésienne
X=a2+Y2
4a2, c’est un segment de parabole inclus dans V, dont les
extrémités sont les points 2a2;2a2.
L’arc image d’une demi-droite horizontale y=b,x2> b2, inclus dans
U1, paramétrée par x, est paramétré par
(y) = (X; Y ) = b2+x2;2bx.
Les points de appartiennent donc à la courbe d’équation cartésienne
X=b2+Y2
4b2, c’est une portion de parabole incluse dans V, dont
l’extrémité est le point 2b2;2b2.
3. La fonction f3est la traduction dans R2de l’application z7! z2de C
dans C.
(a) J(x;y)f3=2x2y
2y2x, les d.p. sont continues sur R2.
det J(x;y)f3= 4 x2+y2. On se place pour commencer sur le
complémentaire de l’origine.
Le système (x2y2;2xy) = (a2b2;2ab), avec (a; b)6= (0;0) donne
x2=apa2+b2
2, et donc deux solutions symétriques par rapport à
l’origine.
Une résolution avec les coordonnées polaires (module/argument de
z) est plus directe encore, z2=jzj2et arg z2= 2 arg z.
Finalement, on restreint f3à un demi-plan ouvert bordé par une
droite passant par l’origine, par exemple Udé…ni par x > 0, et f3
3

est un C1di¤éomorphisme de Usur f3(U), complémentaire de la
demi-droite v= 0,u0.
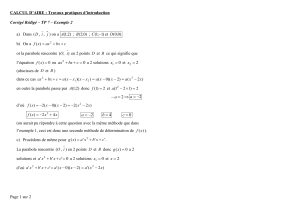
(b) L’arc image d’une droite verticale x=a > 0,y2R, est paramétré
par
(y) = (X; Y ) = a2y2;2ay.
Les points de appartiennent donc à la courbe d’équation cartésienne
X=a2Y2
4a2, c’est une parabole entièrement décrite, contenue dans
f3(U)(courbes en rouge sur la …gure de l’énoncé).
De même, f3transforme les demi-droites horizontales x > 0,y=b
en demi-paraboles, et pour deux valeurs opposées de b, la réunion est
une parabole (courbes en bleu sur la …gure de l’énoncé).
4
1
/
4
100%