3 Fonctions convexes

Prenom Nom
3 Fonctions convexes
The fundamental idea to be understood is that the convex
functions on Rncan be identified with certain convex subsets of
Rn+1 (their epigraphs), while the convex sets in Rncan be
identified with certain convex functions on Rn(their
indicators). These identifications make it easy to pass back and
forth between a geometric approach and an analytic approach.
R.T. Rockafellar (1970). Convex Analysis [447].
Moreau and I independently in those days at first, but soon in
close exchanges with each other, made the crucial changes in
outlook which, I believe, created convex analysis out of
convexity. For instance, he and I passed from the basic objects
in Fenchel’s work, which were pairs consisting of a convex set
and a finite convex function on that set, to extended-real-valued
functions implicitly having effective domains, for which we
moreover introduced set-valued subgradient mappings.
R.T. Rockafellar sur le site Wikimization.
3.1 Définition
Soit Eun espace vectoriel sur R. On note R:= R∪{−∞,+∞} la droite achevée.
En analyse convexe et en optimisation, il est parfois intéressant de pouvoir considérer
des fonctions pouvant prendre des valeurs infinies. En analyse convexe, plutôt que
de définir une fonction convexe comme un couple formé d’un ensemble convexe Cet
d’une fonction fdéfinie sur Cayant une propriété bien particulière (une approche
que l’on rencontre encore parfois), il est préférable de dire que cette fonction prend
des valeurs infinies en dehors de C. On évite ainsi de devoir décrire Cavant de dé-
finir f, en particulier lorsque fest construite par une des opérations non triviales
que nous verrons dans lesquels il est compliqué de déterminer l’ensemble C. C’est ce
à quoi fait allusion la seconde épigraphe de ce chapitre. De même, il peut être utile
de représenter un problème d’optimisation avec contrainte min{f(x) : x∈X}, où X
est une partie de E, par le problème sans contrainte équivalent min{˜
f(x) : x∈E},
où ˜
fprend les mêmes valeurs que fsur Xet vaut +∞sur le complémentaire de X.
Cette astuce conduit à un cadre théorique permettant de traiter en même temps les
problèmes avec et sans contraintes ; nous l’utiliserons souvent.
59

Prenom Nom
60 3. Fonctions convexes
Le domaine effectif (ou simplement domaine) d’une fonction f:E→Rest
l’ensemble des points où elle ne prend pas la valeur +∞. On le note
dom f:= {x∈E:f(x)<+∞}.
On accepte que fprenne la valeur −∞ sur son domaine pour que celui-ci soit convexe
lorsque fest convexe (proposition 3.2, ci-dessous), mais nous considérerons le plus
souvent des fonctions ne prenant pas la valeur −∞. On rappelle que l’épigraphe de f
est la partie de l’espace produit E×Rqui est au-dessus de son graphe :
epi f:= {(x, α)∈E×R:f(x)6α}.
Quant à l’épigraphe stricte, il est obtenu en prenant l’inégalité stricte ci-dessus. On
le note
episf:= {(x, α)∈E×R:f(x)< α}.
Définitions 3.1 On dit qu’une fonction f:E→Rest convexe si son épigraphe (ou
son épigraphe stricte) est convexe dans E×R. On dit que f:E→Rest concave si
−fest convexe. 2
Le fait qu’il soit équivalent de prendre l’épigraphe ou l’épigraphe stricte dans cette
définition est le sujet de l’exercice 3.1 (1).
Proposition 3.2 Le domaine d’une fonction convexe est convexe. Une fonction
f:E→Rest convexe si, et seulement si, pour tout x, y ∈dom fet tout t∈]0,1[,
on a
f(1−t)x+ty6(1−t)f(x) + tf(y).(3.1)
Avant de donner la démonstration de la proposition, observons que le membre de
droite de (3.1) n’est pas ambigu, car les coefficients (1 −t)et tsont strictement
positifs. Donc les produits ne sont pas indéterminés (comme le produit de −∞ par
zéro), même si f(x)ou f(y)valent −∞. Par ailleurs, f(x)ou f(y)ne peuvent pas
prendre la valeur +∞(xet y∈dom f) et donc on n’a jamais l’indétermination ∞−∞.
Démonstration. Supposons que fsoit convexe. Soient x,y∈dom f,t∈]0,1[ et
α,β∈Rtels que α > f (x)et β > f(y)(de tels αet βexistent car xet y∈
dom f). Comme (x, α)et (y, β)sont dans l’épigraphe de f, qui est convexe, il en est
de même de (1−t)(x, α) + t(y, β) = ((1−t)x+ty, (1−t)α+tβ), ce qui se traduit par
f((1−t)x+ty)6(1−t)α+tβ. Comme α > f(x)et β > f (y)sont arbitraires, on
obtient (3.1). En particulier, ((1−t)x+ty)∈dom f; donc dom fest convexe.
Supposons à présent que f:E→R∪ {+∞} vérifie (3.1) pour tout x, y ∈dom f
et tout t∈]0,1[. Soient (x, α)et (y, β)∈epi f; donc xet y∈dom f. D’après (3.1),
on a pour t∈]0,1[ :f((1−t)x+ty)6(1−t)α+tβ. Donc (1−t)(x, α) + t(y, β) =
((1−t)x+ty, (1−t)α+tβ)∈epi f, si bien que epi fest convexe. 2
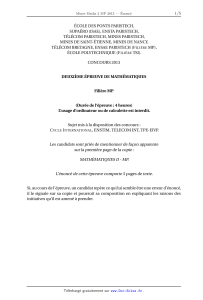
La signification géométrique de l’inégalité de convexité (3.1) est claire (voir la
figure 3.1) : pour être convexe, il faut que, sur tout segment [x, y]⊂dom f,freste
en-dessous de la fonction affine valant f(x)en xet f(y)en y.

Prenom Nom
3.1. Définition 61
y
y
x
+∞
epi fepi f
x
non convexeconvexe
Fig. 3.1. Définition d’une fonction convexe
Définition 3.3 On dit que f:E→R∪ {+∞} est strictement convexe si pour tout
x, y ∈dom favec x6=yet pour tout t∈]0,1[ on a
f(1−t)x+ty<(1−t)f(x) + tf(y).
Sur un espace normé E, on dit que f:E→R∪ {+∞} est fortement convexe de
module α > 0, si pour tout x, y ∈dom fet tout t∈[0,1], on a
f(1−t)x+ty6(1−t)f(x) + tf(y)−α
2t(1−t)kx−yk2.2
Une fonction fortement convexe est donc strictement convexe avec une inégalité de
convexité renforcée par un terme quadratique lui donnant une « courbure » au moins
égale à α.
Une fonction identiquement égale à +∞est convexe (son épigraphe est vide), mais
présente peu d’intérêt. Par ailleurs, une fonction convexe prenant la valeur −∞ est
très particulière (exercice 3.2). Une fonction f:E→Rne prenant pas la valeur −∞
et n’étant pas identiquement égale à +∞est dite propre, sinon elle est dite impropre.
On note
Conv(E)
l’ensemble des fonctions de E→Rqui sont convexes et propres. Ce n’est pas un espace
vectoriel (la différence de deux fonctions convexes n’est généralement pas convexe !),
ni même un cône convexe (à moins que l’on ne suppose les fonctions à valeurs réelles,
car deux fonctions de Conv(E)peuvent avoir des domaines qui ne s’intersectent pas,
auquel cas leur somme est impropre). Si f∈Conv(E), son épigraphe n’est pas vide ;
donc l’intérieur relatif de celui-ci non plus (proposition 2.12). L’exercice 3.1 (2) en
donne une expression explicite :
(epi f)−◦ ={(x, α) : x∈(dom f)−◦, f(x)< α}.(3.2)
Il s’agit donc d’une partie de l’épigraphe stricte de f.
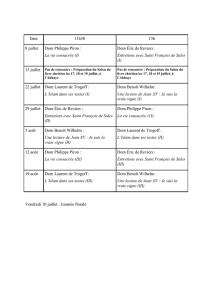
On dit qu’une fonction f:E→Rest fermée si son épigraphe est fermé (il revient
au même de dire que fest s.c.i.). La figure 3.2 représente à gauche une fonction
convexe fermée et à droite une fonction convexe non fermée, ne différant de la première
que par sa valeur en x. On note
Conv(E)
la partie de Conv(E)formée des fonctions fermées.

Prenom Nom
62 3. Fonctions convexes
epi fepi f
x x
f∈Conv(R)f6∈ Conv(R)
f(x)
f(x)
Fig. 3.2. Fonctions convexes fermée (à gauche) et non fermée (à droite)
Considérons le problème d’optimisation suivant :
(PX)min f(x)
x∈X,
dans lequel on cherche à minimiser une fonction fdéfinie sur un espace topologique X
à valeurs dans R∪{+∞} (voir la section 1.1). Le résultat suivant donne des conditions
simples assurant l’unicité de la solution de (PX).
Théorème 3.4 (unicité de solution) Si Xest une partie convexe d’un espace
vectoriel Eet si fest strictement convexe sur X, alors (PX)a au plus une
solution.
Démonstration. On raisonne par l’absurde. Soient x1∈Xet x2∈Xdeux solutions
distinctes, vérifiant donc
f(x1) = f(x2) = min f.
Comme Xest convexe et fest strictement convexe sur X, on a
fx1+x2
2<1
2f(x1) + 1
2f(x2) = min f.
On aurait donc un point x=x1+x2
2appartenant à X(car cet ensemble est convexe)
et tel que f(x)< f(x1). Ceci contredirait l’optimalité de x1et x2.2
3.2 Exemples
3.2.1 Indicatrice
On appelle fonction indicatrice d’une partie P⊂E, ou simplement indicatrice de
P, la fonction IP:E→Rdéfinie par
IP(x) = (0si x∈P
+∞sinon.
Si Pest une partie non vide de E, alors IP∈Conv(E)(resp. IP∈Conv(E)) si, et
seulement si, Pest convexe (resp. convexe fermé) ; c’est le sujet de l’exercice 3.22-(1).

Prenom Nom
3.2. Exemples 63
3.2.2 Fonction affine et minorante affine
Une fonction a:E→Rest dite affine si elle vérifie pour tout x, y ∈Eet tout
t∈R:
a((1−t)x+ty) = (1−t)a(x) + ta(y).
Ceci revient à dire que la fonction x∈E7→ a(x)−a(0) est linéaire. Il s’agit évidemment
d’une fonction convexe, puisque (3.1) est vérifiée avec égalité sans condition sur t∈R.
En dimension finie, il n’y a pas de restriction à supposer que Eest muni d’un produit
scalaire h·,·i. Une fonction affine est alors donnée par un élément x∗∈Eet une
scalaire α∈Ret s’écrit
a:x∈E7→ a(x) = hx∗, xi+α.
L’élément x∗, qui représente l’application linéaire x7→ a(x)−a(0) dans E, est appelé
la pente de a. On voit que, si l’on munit l’espace produit E×Rdu produit scalaire
h(x, α),(y, β)i=hx, yi+αβ, l’épigraphe de as’écrit
epi a={(x, t)∈E×R:hx∗, xi+α6t}
={(x, t)∈E×R:h(x∗,−1),(x, t)i6−α},
qui n’est autre que le demi-espace fermé H−((x∗,−1),−α)de E×R(notation (2.24)).
On appelle minorante affine d’une fonction f:E→R∪ {+∞}, une fonction
affine aqui minore fsur E: pour tout x∈E,f(x)>a(x). L’épigraphe d’une mi-
norante affine de fest donc un demi-espace fermé de E×Rqui contient l’épigraphe
de f. Forcément, si fa une minorante affine, elle ne peut pas prendre la valeur −∞.
On dit qu’une minorante affine ade fest exacte en x0si a(x0) = f(x0). Dans ce cas,
elle s’écrit
a(x) = f(x0) + hx∗, x −x0i.
Les fonctions convexes et propres ont des minorantes affines. Cette propriété sera
souvent utilisée, ce qui justifie l’introduction de ce concept.
Proposition 3.5 (existence de minorante affine) Toute fonction f∈
Conv(E)a une minorante affine et celle-ci peut être choisie exacte en un point
donné de (dom f)−◦. De manière plus précise, si x∈(dom f)−◦, il existe x∗∈E
parallèle à aff(dom f)tel que, pour tout y∈E, on a
f(y)>f(x) + hx∗, y −xi.
Démonstration. Supposons d’abord le domaine de fsoit d’intérieur non vide et que
x∈(dom f)◦. Comme (x, f(x)) est sur la frontière de epi f(les points (x, α)/∈epi f
si α < f(x)), on peut trouver une normale non nulle (x∗
0, ν)àepi fen (x, f(x))
(proposition 2.31, on a muni E×Rdu produit scalaire naturel de l’espace produit).
Pour tout (y, α)∈epi f, on a donc
hx∗
0, y −xi+ν(α−f(x)) 60.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
1
/
77
100%