Conversion électromécanique

Induction 3 Conversion électromécanique
Lycée Polyvalent de Montbéliard - Physique-Chimie - TSI 1 - 2016-2017
Contenu du programme officiel :
Notions et contenus Capacités exigibles
Conversion de puissance mécanique en puissance élec-
trique.
- Interpréter qualitativement les phénomènes observés.
Rail de Laplace. - Établir les équations électrique et mécanique en précisant les conventions
de signe.
- Établir et interpréter la relation entre la puissance de la force de Laplace
et la puissance électrique.
- Effectuer un bilan énergétique.
Freinage par induction. - Expliquer l’origine des courants de Foucault et en connaître des exemples
d’utilisation.
-Mettre en évidence qualitativement les courants de Foucault.
Conversion de puissance électrique en puissance méca-
nique.
Haut-parleur électrodynamique.
- Expliquer le principe de fonctionnement d’un haut-parleur électrodyna-
mique.
- Utiliser la relation entre la puissance de la force de Laplace et la puissance
électrique.
- Effectuer un bilan énergétique.
Moteur à courant continu à entrefer plan. - Expliquer le principe de fonctionnement d’un moteur à courant continu
à entrefer plan en utilisant les forces de Laplace.
Moteur à courant continu, machine synchrone, machine
asynchrone.
- Décrire qualitativement les principes des machines.
- Expliquer les avantages et inconvénients des différentes machines et don-
ner des exemples d’utilisation.
-Effectuer un bilan énergétique.
Pilotage des moteurs. - Modifier le fonctionnement des moteurs (vitesse ou couple) en
agissant sur certains paramètres électriques.
En gras les points devant faire l’objet d’une approche expérimentale.
Table des matières
1 Conversion de puissance mécanique en puissance électrique 1
1.1 Retour sur l’exemple de rails de Laplace. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Les courants de Foucault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Conversion de puissance électrique en puissance mécanique 4
2.1 Le haut-parleur électrodynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Machine à courant continu à entrefer plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Les convertisseurs électromécaniques de puissance 7
3.1 Principe des convertisseurs électromécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 La machine à courant continu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3 Lamachinesynchrone......................................... 9
3.4 La machine asynchrone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Ce dernier chapitre d’induction permet de comprendre les techniques utilisées dans la conversion d’éner-
gie, aussi bien de la conversion mécanique vers électrique (principe d’une centrale) que de la conversion
électrique vers mécanique (principe d’un moteur). Ces éléments sont la base de toute l’électronique de
puissance moderne.
1 Conversion de puissance mécanique en puissance électrique
1.1 Retour sur l’exemple de rails de Laplace
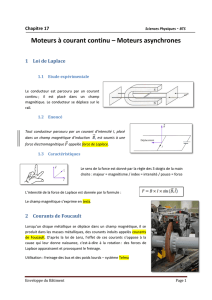
On considère le dispositif des rails de Laplace représenté ci-dessous constitué :
de deux rails fixes conducteurs parallèles distants de L;
Maxime Champion - www.mchampion.fr 1/11

Induction 3 : Conversion électromécanique Maxime Champion
d’une barre conductrice rectiligne mobile MN, pouvant se déplacer suivant la direction des deux rails
fixes.
L’ensemble forme un circuit déformable, plongé dans un champ magnétique #”
B=B#”
ezstationnaire et
uniforme. On considère que le circuit ainsi formé possède une résistance totale R. On applique à la barre
une force #”
F=F#”
exmettant en mouvement la barre avec une vitesse #”
v=v#”
ex= ˙x#”
ex. L’ensemble du
systèmes est représenté figure 1.
R
i(t)
e(t)
•
#”
B
L
M
N
#”
F
x
y
•
z
Fig. 1 – Schéma de l’expérience des rails de Laplace : la tige mobile MN ferme le circuit électrique et on note R
la résistance totale du circuit. Le circuit est placé dans un champ magnétique extérieur, uniforme et constant.
La f.é.m. eprovient des phénomènes d’induction uniquement. La tige mobile est tirée avec une force constante.
IInterprétation qualitative
On a les différents phénomènes suivant le schéma ci-dessous.
Courant Force de Laplace Déformation circuit F.é.m.
Magnétisme Mécanique Induction
Électricité
Il est à noter que le phénomène d’induction est un phénomène modérateur à cause de la loi de modération
de Lenz. Ainsi, cette boucle va avoir tendance à s’opposer à l’ensemble du phénomène, donc à freiner la
barre. Le système possède une rétroaction.
Nécessairement, l’étude du système se fait en plusieurs étapes distinctes :
une étude mécanique ;
une étude électrique ;
une étude de l’induction.
IÉtude quantitative
Étude mécanique : Le système est la tige MN étudié dans le référentiel du laboratoire supposé galiléen.
On note x(t)la position de la tige par rapport au début du circuit.
Deux forces s’appliquent sur la tige :
la force constante #”
F=F#”
ex;
la force de Laplace, avec la convention du sens du courant du schéma, #”
FL=i
# ”
MN ∧
#”
B=−iLB #”
ex.
On applique la seconde loi de Newton et il vient en projetant sur #”
ex
m¨x(t) = F−iLB . (1.1)
Étude électrique : Le circuit est simplement constitué d’une source de tension eet d’une résistance R.
On a donc simplement la loi d’Ohm
e(t) = Ri(t).(1.2)
Étude de l’induction : La surface délimitée par le circuit est donnée par Lx(t). Ainsi, le flux du champ
dans le circuit vaut Φ(t) = −Lx(t)B(attention à l’orientation de la surface !). On applique la loi de Faraday
e=−dΦ(t)
dt=LB ˙x(t)(1.3)
2/11

Induction 3 : Conversion électromécanique Maxime Champion
Analyse finale : Les trois étapes physiques étant effectuées, on peut utiliser les trois équations (1.1), (1.2)
et (1.3) pour arriver à l’équation du mouvement
¨x(t) + L2B2
mR ˙x(t) = F
m(1.4)
et à l’équation d’évolution du courant
di(t)
dt+L2B2
mR i(t) = LBF
mR .(1.5)
Application 1 : Trouver ces deux équations à partir des équations (1.1),(1.2) et (1.3).
On peut résoudre ces équations différentielles en posant τ=mR
L2B2. Il vient pour la vitesse, en prenant
v(0) = 0,
v(t) = RF
L2B21−exp −t
τ .(1.6)
Après un régime transitoire d’une durée d’environ 5τ, un régime permanent en vitesse et courant est atteint.
Application 2 : En supposant que i(0) = 0, combien vaut le courant i(t)en chaque instant ?
L’induction a un effet modérateur, de freinage, car la force de Laplace s’oppose au forçage extérieur et
impose une vitesse constante.
Remarque : Si au point de départ on choisit une autre convention pour le sens du courant,
il faut aussi inverser la source de tension epar définition de l’induction. Mais dans le cas, la
force de Laplace doit s’écrit i
# ”
NM ∧
#”
B=iLB #”
xet change donc de signe. De même, le flux
devient positif car le vecteur #”
Schange d’orientation. Tous ces changements de signes laissent
l’équation (1.4) inchangée, ce qui est rassurant pour le mouvement. Par contre, l’équation (1.5)
est modifiée, il faut remplacer Fpar −F, le courant change donc de signe. C’est cohérent avec
le changement d’orientation initial.
IÉtude énergétique
On remarque dans cet exemple que la puissance mécanique (liée à la force appliquée par un opérateur),
est convertie en puissance électrique (apparition d’un courant et de puissance Joule).
Calcul de la puissance électrique : La puissance électrique reçue par le circuit vaut simplement Pélec =
Ri2(t) = −e(t)i(t) = i(t)LB ˙x(t). Il s’agit de la puissance dissipée par effet Joule dans le circuit.
Calcul de la puissance mécanique : L’opérateur qui impose la force #”
Ffournit la puissance mécanique
Pmeca =F˙x(t). Par ailleurs, la puissance de la force de Laplace vaut PLaplace =−i(t)LB ˙x(t).
Bilan d’énergie : On remarque d’abord que
PLaplace =−i(t)LB ˙x(t) = −Pélec .
Propriété. Dans cet exemple du rail de Laplace, la puissance mécanique fournie par la force de Laplace
est intégralement convertie en puissance électrique utilisable dans le circuit.
Par ailleurs, en appliquant le théorème de la puissance cinétique, on a
Pmeca =dEc(t)
dt− PLaplace =dEc(t)
dt+Pélec =dEc(t)
dt+Ri2(t).
Autrement dit, l’énergie fournie par l’opérateur sert à mettre en mouvement la tige mais est aussi en
partie perdue par effet Joule dans le circuit à cause de la conversion de puissance mécanique en puissance
électrique.
Propriété. Une fois que le régime transitoire est fini, la vitesse et l’énergie cinétique sont constantes. Ainsi,
lors du régime permanent, l’intégralité de la puissance mécanique fournie par l’opérateur est convertie en
puissance électrique.
3/11

Induction 3 : Conversion électromécanique Maxime Champion
1.2 Les courants de Foucault
IMise en évidence expérimentale
Expérience 1 : Mise en évidence du freinage d’un pendule par induction : pendule dans un
aimant et chute d’aimant dans un tube métallique.
Lorsque que le pendule oscille dans l’entrefer, en présence d’un champ
magnétique, on constate un amortissement de ce dernier.
Lors du passage du pendule en cuivre dans le champ magnétique créé
par l’aimant, il y a variation de flux et apparition de courants induits
dans le disque. Ces courants sont les courants de Foucault.
La force de Laplace qui apparaît s’oppose alors déplacement du pen-
dule. L’énergie mécanique est convertie en énergie électrique dissipée
effet Joule. Il y a un freinage et le dispositif chauffe, à travers la mé-
diation du champ magnétique.
Remarque : Il est à noter que le champ magnétique, indispensable au processus, ne fournit pas
d’énergie. Son rôle est uniquement de permettre la conversion entre les deux types d’énergie.
Définition. On appelle courants de Foucault les courants électriques créés dans une masse conductrice,
soit par la variation au cours du temps d’un champ magnétique extérieur traversant ce milieu (le flux du
champ à travers le milieu), soit par un déplacement de cette masse dans un champ magnétique constant.
Ils sont une conséquence de l’induction électromagnétique.
Remarque : Reprenons l’exemple précédent en prenant un forçage nul F= 0 mais une vitesse
initiale de tige non nulle v(0) = v06= 0. Dans ce cas, la solution de l’équation (1.4) sera une
exponentielle décroissant vers 0. Il s’agit directement d’un freinage par induction.
Le courant i(t)dans le circuit est donc un courant de Foucault.
IQuelques applications pratiques...
Les plaques de cuisson par induction : Un champ magnétique variable, généré par la plaque de
cuisson, crée des courant de Foucault dans le fond de la casserole (conductrice, pouvant être assimilée à
une bobine). La casserole possédant une résistance importante, elle chauffe par effet Joule.
Freins dans les transports : Un disque métallique conducteur est associé
à l’arbre de transmissions du véhicule. Le système produit, sur demande,
un champ magnétique plus ou moins important, provoquant l’apparition
de courants de Foucault dans le conducteur. L’énergie mécanique est alors
convertie en énergie électrique puis dissipée par effet Joule. Ce système est
équivalent à l’action d’un frottement fluide (car l’action est proportionnelle
à la vitesse). Ce système est utilisé par exemple sur les TGV et pour certains
poids lourds.
Avantages : Freinage doux, évitant la surchauffe des disques de frein.
Inconvénients : Ce système ne peut pas remplacer le freinage mécanique,
car il n’agit pas assez à basse vitesse.
2 Conversion de puissance électrique en puissance mécanique
2.1 Le haut-parleur électrodynamique
Un haut-parleur électrodynamique se compose d’une bobine conductrice, solidaire de la membrane. Un
aimant génère un champ magnétique radial au cœur de la bobine.
Lorsque l’on alimente le haut-parleur, un courant circule dans la bobine. La bobine subit les forces de
Laplace et se met en mouvement, entraînant la membrane. Une f.e.m induite apparaît alors dans la bobine.
Un haut-parleur est donc un convertisseur de signaux électriques en signaux sonores.
4/11

Induction 3 : Conversion électromécanique Maxime Champion
Fig. 2 – Principe du haut-parleur.
IModélisation et mise en équation
On considère le circuit représenté figure 3. Le système est analogue au rail de Laplace mais cette fois
ci, la tige est solidaire d’une membrane qui peut donc vibrer sous l’effet de la force de Laplace. Il n’y a pas
de forçage mécanique extérieur. Il faut prendre en compte des effets inductifs en rajoutant une bobine.
L
R
e(t)
i(t)
u(t)
M
N
•
#”
B
x
y
•
z
x(t)
0
membrane vibrante
Fig. 3 – Modélisation d’un haut parleur électrodynamique. Le forçage vient de la tension variable u(t)tandis
que e(t)est la f.é.m. induite.
Étude mécanique : Le système est la tige MN étudié dans le référentiel du laboratoire supposé galiléen.
On note x(t)la position de la tige par rapport à la longueur à vide 0du ressort.
Application 3 : Après avoir fait un bilan des forces, montrer que l’on obtient l’équation mécanique
m¨x(t) = −α˙x(t)−kx(t)−i(t)LB . (2.1)
Étude électrique : Le circuit est constitué d’une source de tension u(t), de la f.é.m. induite e(t)et d’une
résistance R. La loi des mailles implique
u(t) + e(t) = Ri(t).(2.2)
Étude de l’induction :
Application 4 : Montrer que Φ(t) = −L(0+x(t))Best le flux du champ magnétique dans le
circuit. En déduire que la f.é.m. induite est donnée par
e(t) = LB ˙x(t).(2.3)
5/11
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%