1 Exercice 1

TD n◦1
Automatique : Mod´elisation des syst`emes
H. Khennouf
La pr´epa - Grenoble-INP
1 Exercice 1 : syst`eme hydraulique
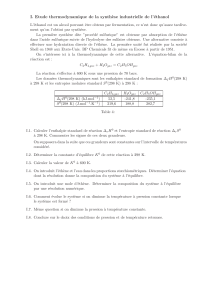
On consid`ere le syst`eme d´ecrit dans la figure
ci-contre. Il est compos´e d’un r´eservoir de
section Cet d’une ´evacuation caract´eris´ee
par la r´esistance lin´eaire R. Le niveau de
liquide dans le r´esevoir est not´e h(t). Le
d´ebit sortant est suppos´e v´erifier la relation
qs(t) = h(t)
R.
1. D´eterminer l’´equation diff´erentielle r´egissant l’´evolution du niveau dans le r´eservoir.
2. Dans le cas o`u le d´ebit d’entr´ee est un ´echelon unitaire, d´eterminer et tracer la
r´eponse h(t) du syst`eme. On notera h0le niveau de liquide `a l’instant initial.
3. D´eterminer la fonction de transfert : G(s) = H(s)
Qe(s)o`u H(s) repr´esente la trans-
form´ee de Laplace de h(t) et Qe(s) repr´esente la transform´ee de Laplace de qe(t).
2 Exercice 2 : syst`eme m´ecanique
Le syst`eme consid´er´e est un pendule simple
constitu´e d’une tige rigide de longueur let
d’une masse mconform´ement `a la figure ci-
contre. Soit θ(t) l’angle que fait la tige avec
l’axe vertical.
1

Le pendule est soumis `a un couple T(t) appliqu´e au point O; ce couple repr´esente
la commande du syst`eme. En supposant que la masse mest soumise `a une force de
frottement dont le coefficient de frottement est k, et que le mouvement a lieu dans un
plan, l’´equation de mouvement du pendule s’´ecrit :
ml2¨
θ(t) = −mgl sin (θ(t)) −kl2˙
θ(t) + T(t) (1)
Nous limiterons notre ´etude au cas o`u l’angle θ(t) subit de faibles variations de sorte
que sin (θ(t)) ≈θ(t).
1. D´eterminer l’´equation diff´erentielle lin´eaire reliant l’angle θ(t) au couple T(t).
2. En d´eduire la fonction de transfert du syst`eme d’entr´ee T(t) et de sortie θ(t).
3 Exercice 3 : Syst`eme ´electrom´ecanique
On consid`ere un moteur `a courant continu command´e par la tension u(t) aux bornes
de l’induit du moteur de r´esistance Ret d’inductance L. On notera Jl’inertie du moteur
ramen´ee `a l’arbre, fle coefficient de frottement visqueux sur l’arbre, et on consid´erera
que le couple moteur est proportionnel au courant circulant dans le circuit induit :
Tm(t) = ki(t). La force ´electromotrice induite est proportionnelle, avec le mˆeme facteur
k, `a la vitesse de rotation du moteur : e(t) = kΩ(t).
1. ´
Ecrire l’´equation ´electrique aux
bornes du circuit induit.
2. ´
Ecrire l’´equation m´ecanique du mo-
teur.
3. D´eterminer la fonction de transfert
Ω(s)
U(s), o`u Ω(s) repr´esente la trans-
form´ee de Laplace de Ω(t) et U(s)
repr´esente la transform´ee de Laplace
de u(t).
+
-
J
ω
)(tu
)(ti
R
L
)(te f
2

4 Exercice 4 : syst`eme ´electrique
Soit le circuit RLC aliment´e par une source de tension u(t) repr´esent´e sur la figure
ci-dessous :
La sortie du syst`eme est la tension y(t) aux bornes du condensateur.
1. Montrer que la relation entr´ee-sortie du syst`eme s’´ecrit :
d2y(t)
dt2+R
L
dy(t)
dt +1
LC y(t) = u(t)
LC
2. D´eterminer la fonction de transfert H(s) = Y(s)
U(s).
3. Ecrire la fonction de transfert sous la forme :
H(s) = K
1 + 2ξ
ωns+s2
ω2
n
et d´eterminer K,ξet ωnen fonction des param`etres du syst`eme.
On place le syst`eme dans une boucle de commande, conform´ement `a la figure
ci-dessous, dans laquelle Kpest une constante.
4. D´eterminer la fonction de transfert en boucle ferm´ee HBF (s) = Y(s)
Ydes(s)lorsque la
perturbation pe(t) est nulle.
5. D´eterminer la fonction de transfert Hreg (s) = Y(s)
Pe(s)lorsque la consigne ydes(t) est
nulle.
6. En d´eduire la sortie Y(s) en pr´esence de la consigne et de la perturbation.
3
1
/
3
100%