Mouvement d`un solide dans un champ gravitationnel

T-STL-PL
Mouvement d'un solide dans un champ gravitationnel
1-Interaction gravitationnelle
1.1 Loi de Newton.
A partir de l'observation du mouvement des planètes, Newton énonça en 1666 la loi d'attraction
universelle
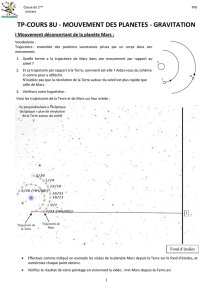
Deux corps ponctuels A et B, de massa mA et mB, exercent l'un sur l'autre des forces
d'attraction directement opposées, dirigées suivant la droite AB, d'intensités
proportionnelles à leurs masses et inversement proportionnelles au carré de leur distance :
r = AB et
..
AB
2
mm
F = - F = - G
r
AB BA→→
u
u
r
un vecteur unitaire sur AB
u
rurr
La constante de proportionnalité G est appelée constante de la gravitation universelle
Dans le système international d'unités, sa valeur est G = 6,67 10-11 m3.kg-1.s-2 (ou SI)
A
B
F
B
A→
ur
F
u
r
A
B→
Remarque : si l'on considère deux solides non ponctuels, la même relation s'applique, mais A et B sont
alors les centres d'inertie des deux solides et mA et mB les masses totales.
1.2 Champ de gravitation.
Définition : on dit qu'il existe un champ de gravitation en un point de l'espace, si une particule
de masse m placée en ce point est soumise à une force gravitationnelle.
Exemple : une sonde interplanétaire envoyée vers Mars depuis le Terre ressent plus ou moins les
champs de gravitation de le Terre, de Mars et du Soleil. Pendant la plus grande partie de son
périple, ce sera le champ gravitationnel du Soleil qui sera prédominant. Ce n'est qu'au début et à la
fin de la trajectoire que les champs planétaires de La Terre puis de Mars seront importants.
Remarque : en un point de l'espace plusieurs corps peuvent exercer une influence
gravitationnelle. Un solide de masse m subira une force totale égale à la somme vectorielle des
forces gravitationnelles dues à chacune des sources.
En un point de l'espace, le champ gravitationnel est caractérisé par un vecteur champ de
gravitation . La force gravitationnelle subie par un solide placé en ce point est donnée par :
G
ur
F = m.G
ur u r
1

1.3 Energie potentielle de gravitation.
Lorsqu'un solide soumis à une force gravitationnelle se déplace, cette force fournit un travail W.
Par définition, ce travail est égal à la diminution d'énergie potentielle de gravitation (c'est
l'opposé de la variation d'énergie potentielle de gravitation) :
W (force gravitationnelle) = - (énergie pot. de gravitation finale – énergie pot. init.)
Dans le cas simple d'un objet de masse m se déplaçant à une distance r d'un solide de masse M
considéré comme fixe, on montre que l'énergie potentielle de gravitation s'exprime par la relation
suivante :
p
M.m
E - G
r
= N.B. : Le signe "-" vient du fait que le travail de la force gravitationnelle
est positif pour un déplacement de l'infini à la position étudiée (force et
déplacement de même sens. L'énergie potentielle négative veut dire aussi
que la masse m est "piégée" dans le champ gravitationnel créé par M.
Par convention, on dit que cette énergie potentielle est nulle lorsque les masses M et m sont à une
distance infinie l'une de l'autre.
2-Applications
2.1. Champ de gravitation de la Terre
La forme de la Terre est assez proche d'une sphère, pour simplifier, on considère que tout objet de
masse m au voisinage de la Terre, subit une force d'attraction exercée par un point situé au centre
de la Terre et dont la masse est la masse totale M de la Terre :
Le "poids" de l'objet est donné par .
2
T
M
P = G. m = m.
g
(R +h)
⎛⎞
⎜⎟
⎝⎠
L'intensité de la pesanteur est donc donnée par 2
T
G.M
g = (R +h) dont la valeur diminue avec
l'altitude h du point considéré.
RT est le rayon terrestre
RT = 6370 km
M = 5,98 1024 kg
h est l'altitude du point
Au voisinage de la surface terrestre (pour h = 0) on retrouve la valeur connue de g = 9,81 N.kg-1
Si l'on appelle g0 la valeur de g pour h = 0 (à la surface de la Terre), on peut écrire que :
02
T
G.M
g = R en remplaçant G.M dans l'expression de g, on obtient : .2
T
02
T
R
g = g (R + h)
N.B. Une formule approchée donne g(h) si h est très petit devant R : .( )
0
T
2h
g = g 1 - R
2.2. Champ de gravitation à la surface d'une planète ou d'une étoile
En fait, le champ de gravitation se calcule de la même façon que pour la Terre, seule la donnée de
la masse totale et celle du rayon change :
Exemple : pour le Soleil, masse M = 1,99.1030 kg rayon = 696000 km
g = G.M/R2 = 274 N.kg-1 (ou m.s-2) donc une valeur 28 fois plus grande que sur la Terre !
Une masse de 1 kg aurait donc un "poids" de 274 N sur la surface du Soleil
2

2.3. Mouvement des planètes.
Une planète est essentiellement soumise à l'attraction gravitationnelle du Soleil. les forces
exercées par les autres planètes sont négligeables en première approximation (on n'en tient compte
que pour des calculs très précis).
Le mouvement des planètes est décrit par les trois lois de Képler (publiées vers 1609-1619) :
Première loi de Képler :
Les planètes ont une trajectoire en forme d'ellipses dont l'un des foyers est occupé par le Soleil.
En fait ces trajectoires sont très proches de cercles (par exemple pour la Terre la distance Terre-
Soleil ne varie que de 3,3%. Seule le trajectoire de Pluton est très elliptique.
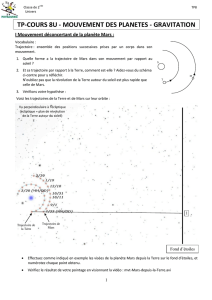
Deuxième loi de Képler :
Troisième loi de Képler :
Les carrés des temps de révolution (période T) des planètes sont proportionnels aux cube des
grands axes des orbites (pratiquement : le rayon moyen de la trajectoire).
3
2
a = Cte
T et cette constante ne dépend pas de la masse des planètes
L'aire balayée par le rayon-vecteur (segment qui joint le
soleil à la planète) est proportionnelle au temps.
Autrement dit, si l'on fait l'approximation d'une
trajectoire circulaire, la vitesse angulaire de la planète est
quasiment constante au cours de son mouvement : le
mouvement est pratiquement circulaire uniforme.
N.B. : On peut facilement vérifier que le graphe de T2 en fonction de a3 est une droite.
Remarque : le mouvement d'une planète est décrit dans un référentiel de Copernic (le centre d'inertie
du système solaire est l'origine du repère, les trois axes perpendiculaires entre eux sont définis par des
directions fixes pointant vers des étoiles "fixes". L'une des directions est perpendiculaire au plan de
l'écliptique (plan dans lequel se déplacent les planètes autour du Soleil) les deux autres directions sont
contenues dans ce plan. (voir schéma à la fin de ce polycopié).
3

2.4. Mouvement d'un satellite (artificiel ou naturel)
Le mouvement d'un satellite de la Terre est décrit dans un référentiel géocentrique :
On choisit un repère dont l'origine est le centre d'inertie de la Terre, et trois axes perpendiculaires
entre eux sont parallèles aux axes du repère de Copernic cité ci-dessus.
2.4.1 Vitesse et période d'un satellite.
Un satellite est un corps gravitant autour d'une planète. La Lune est un satellite de la Terre par
exemple. Pratiquement toutes les planètes ont leur cortège plus ou moins nombreux de satellites.
On cite souvent les quatre principaux satellites de Jupiter, car ils ont été observés très tôt (dès que
Galilée a découvert la lunette portant son nom...)
Depuis quelques décennies, il existe des satellites artificiels, objet de quelques dizaines à
quelques centaines de kg envoyées dans l'espace par de puissantes fusées et qui gravitent pendant
de nombreuses années dans notre ciel.
Les lois régissant le mouvement des satellites sont les mêmes qu'ils soient naturels ou artificiels.
Ici, on se contente d'étudier le cas de satellites à trajectoire circulaire :
- le centre de la trajectoire est confondu avec le centre de la Terre.
- comme pour tout mouvement circulaire uniforme, le satellite a une accélération centripète
dont la valeur est g (et qui dépend de l'altitude h à laquelle se trouve le satellite).
Cette accélération centripète est aussi égale à v2/R
Comme R = RT + h et .2
T
02
T
R
g = g (R + h)
on obtient l'expression de la vitesse :
0
T
T
g
v = R R + h
la vitesse angulaire est ω = v/R donc .
2
T0
3
T
R
g
ω = (R h)+
d'où l'expression de la période de révolution d'un satellite de trajectoire circulaire :
.
3
T
2
0T
2π(R + h)
T = = 2π
ωgR
(
)
vhR2 T+
=
π
Remarque : cette relation montre de façon évidente la troisième loi de Képler, puisque
(.
22
2
3
TT
0T
T4.π4.π
= =
R + h) G.M
gR
2
Ce rapport est donc constant et indépendant de la masse du satellite.
2.4.2 Cas d'un satellite géostationnaire.
Ce type de satellite a la particularité de rester immobile par rapport à un lieu à la surface de la
Terre. Sa vitesse angulaire est donc imposée et égale à celle de la Terre (1 tour par 24 h) ce qui
correspond à T = 86164 s. (23 h 56 min exactement, une révolution dite "sidérale").
Par conséquent, à cause de la relation ci-dessus, l'altitude de ce type de satellite ne peut pas être
quelconque. L'altitude est obligatoirement telle que RT + h = 42000 km
donc h = 36000 km puisque RT = 6400 km environ
Un satellite géostationnaire est donc obligatoirement à une altitude de 36000 km !
4

2.4.2 Lancement de satellites
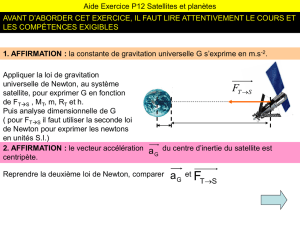
En fonction de la vitesse de lancement du satellite, différents types de trajectoires sont possibles.
La figure ci-dessous résume tous les cas possibles :
* Si la vitesse de lancement est supérieure à une
valeur vL (vitesse de libération), l'objet devient
une sonde spatiale (elle est libérée de la Terre et
peut aller très loin dans l'univers) sur une
trajectoire hyperbolique dont la Terre reste un
des foyers.
* Si la vitesse de lancement est égale à vL, la
trajectoire est parabolique, l'objet s'éloigne de la
Terre. ( Lc
v = v 2)
* Si la vitesse de lancement est inférieure à vL,
la trajectoire est elliptique (la Terre est à l'un des
foyers de l'ellipse)
* Pour une vitesse particulière vc la trajectoire du
satellite est circulaire.
On peut calculer différentes vitesses limites :
* Première vitesse cosmique : c'est la vitesse minimale pour pouvoir mettre un satellite sur une
orbite circulaire basse. Pour cela, il faut que le satellite soit hors de l'atmosphère, on admet que
l'altitude minimale est de h = 130 km, donc R = RT + h = 6500 km
L'accélération centripète du mouvement circulaire uniforme est v2/R et doit être égale à g.
== m
F
a2
2
G.M v
=
RR
donc G.M
v = R le calcul donne v1 = 7,83 km.s-1
N.B. : en pratique, le lancement se fait de préférence d'un point de la Terre proche de l'équateur
(Kourou pour les français) et vers l'est pour profiter de la vitesse de rotation de la Terre sur elle-
même. Ainsi la vitesse à communiquer effectivement grâce à la fusée de lancement peut être
réduite à 7,36 km.s-1.
* Deuxième vitesse cosmique : c'est la vitesse à communiquer pour que le satellite échappe à
l'attraction terrestre et puisse devenir une sonde spatiale se dirigeant vers les autres planètes.
L'énergie mécanique du satellite à une distance d de la Terre est donnée par :
2
1M
E = mv - G
2d
.m
cette énergie est positive et se réduit à l'énergie cinétique lorsque l'objet
est très loin de la Terre (d = )
∞
Comme cette énergie est conservée, elle doit aussi être positive également au moment du
lancement, donc : 2
00
TT
1M.m 2G
mv - G 0 donc v
2R
≥≥
.M
R
L'application numérique donne v2 = 11 km.s-1
* Troisième vitesse cosmique : c'est la vitesse de lancement nécessaire pour arracher l'objet à
l'attraction terrestre, puis à celle du Soleil pour qu'il puisse quitter le système solaire.
Un calcule plus complexe montre que cette vitesse doit être de 16,4 km.s-1.
5
 6
6
1
/
6
100%