"des liaisons" -acides -orbital

ETUDE DE
LA BORNE REGLABLE
Liaisons, Cinématique, Statique et
Liaisons, Cinématique, Statique et
hyperstatisme
1

On appelle système mécanique un ensemble organisé de pièces
reliées par des liaisons et destiné à remplir une fonction bien
déterminée.
I. Définition
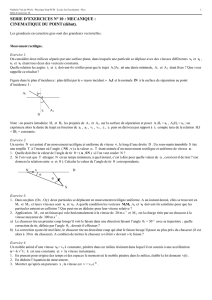
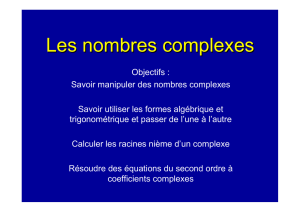
Exemple: Buté réglable
II. Fonction globale:
La fonctions principale correspond
au service rendu par le système mécanique
en vue de répondre à un besoin
La borne réglable peut être utilisé
comme élément de montages d’usinage. Il réalise
un contact localisé réglable en position verticale.
Pour cela, la semelle est fixée sur le montage
d’usinage, et le contact avec la pièce à usiner se
fait par la butée 6. La position verticale de cette
butée 6 est réglée en actionnant la vis moleté 4. Le
même système peut être utilisé pour le
dégauchissage des pièces mécanique en
métrologie (réglage de planéité dans le TP de
métrologie par exemple).
en vue de répondre à un besoin
2

3

1
5
2
3
4
5
4
57
6
4

5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
1
/
51
100%