Bilan de forces et mouvement d'un solide - TP Mécanique

Bilan de forces, mise en mouvement d’un solide
Dans ce TP, il faut être capable d’utiliser des connaissances et méthodes abordées en 2nde et 1ère :
• Notion vectorielle de force
• Référentiels, positions, vitesse et accélération d’un solide en translation
• Principe d’inertie et condition statique.
Activité 1 : Bilan de forces avec ou sans frottements (55min)
Une force est représentée par un vecteur et caractérisée également par son point d’application (ex :
force ~
Fde norme Fen Nappliquée au point M).
Lors d’une étude mécanique, l’étude des forces appliquées au système nécessite de faire des
projections des vecteurs dans un repère mathématique choisi et associé au référentiel d’étude.
Après projection, on peut alors travailler sur les coordonnées des vecteurs (on parle parfois de
composantes ou de projections).
Avec l’animation ci-dessus et pour les pages 3 à 10 (sans frottements) puis 16 à 19 (avec
frottements) :
1. préciser le système et le référentiel,
2. effectuer le DOI puis en déduire le bilan de forces,
3. dessiner avec une échelle cohérente le système et ses forces,
4. effectuer dans le repère la projection des forces,
5. le solide est-il en mouvement ou immobile ?
6. justifier en réfléchissant à la vitesse du système étudié.
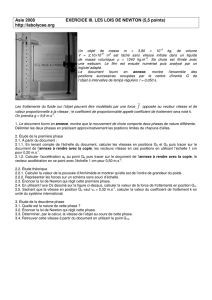
Activité 2 : Un cas réel : mobile sur plan incliné (1h)
On considère le système de plan incliné suivant. L’étude se fera sur le solide A.
La poulie parfaite de masse nulle, fil inélastique de masse nulle.
Les masses des 2 solides sont identiques mA=mB=m.
α
A
B
TSTI - Mécanique page 1 TP n◦- Date :

1. Coefficient de frottement statique µset limite d’immobilité :
(a) Préciser le référentiel d’étude et le système étudié.
(b) Mesurer sur la maquette disponible, la valeur de l’angle αcorrespondant à la limite d’équi-
libre.
(c) Préciser en la justifiant la condition vectorielle assurant l’immobilité du solide.
(d) Effectuer sur une figure, inspirée de celle donnée ci-dessus mais avec la bonne inclinaison,
le bilan des forces appliquées au système à la limite d’immobilité (échelle 10cm pour 1N)
(e) Projeter sur les axes d’un repère choisi simplement.
(f) Déduire des questions précédentes, avec des considérations géométriques, les deux équations
suivantes : (Ff rott =m·g−m·g·sin α
N=m·g·cos α
(g) Déterminer grâce au résultat de la projection le coefficient de frottement statique µslié au
contact entre le solide et la surface.
(h) Comparer le coefficient cinétique µcet le statique µspour un même contact.
vidéo : video-frottement-contact.mp4 et animation : frottement-plan-incline.swf
2. Solide en mouvement : coefficient de frottement cinétique
On considère désormais le cas de la vidéo fournie en début d’activité et on va chercher à
évaluer la valeur du coefficient cinétique µcet "en passant", vérifier une loi essentielle de la
mécanique newtonienne.
(a) Mesurer sur la vidéo la valeur de l’angle d’inclinaison α.
(b) La vidéo est filmée à 15 images/s. Quel est l’intervalle de temps τentre images successives ?
(c) Utiliser un logiciel de pointage (Avimeca, Pymecavideo ou mieux Tracker) pour effectuer le
pointage des positions du centre de gravité du solide Aau cours du temps.
• choisir une échelle
• choisir une origine
• choisir un repère (si c’est possible).
(d) Copier-coller les colonnes de t,xet ydans un tableur puis créer les colonnes vxet vyen
vous inspirant des indications du DOC 3.
(e) En déduire grâce au théorème de Pythagore la colonne de la vitesse vdu mobile A.
(f) Tracer la courbe d’évolution de ven fonction du temps t.
(g) Caractériser cette évolution et donner une équation de v(t).
(h) Proposer une valeur pour l’accélération a(m.s−2) du mobile.
(i) Sachant que dans notre cas (avec Ttension du fil) :
(2m·a=mg −mg ·µc·cos α−mg sin α
T=mg −ma
Déterminer la valeur de µc.
Questions complémentaires :
• Montrer que les valeurs proposée dans la figure geogebra sont correctes (détails de construction
avec affichage de la Barre de Navigation, puis 0,25s et lecture depuis le début).
• Comparer la valeur de la résultante des forces avec une combinaison de la masse mdu mobile
Aet de son accélération a.
TSTI - Mécanique page 2 TP n◦- Date :

Annexe Documentaire
DOC 1 : Principe d’inertie
Dans un référentiel galiléen, il y a équivalence entre Σ ~
F=~
0 appliquées au système et vitesse ~v
constante du système.
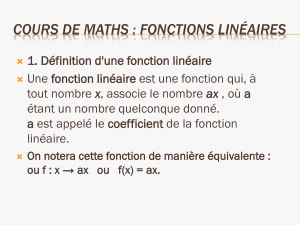
DOC 2 : Projection de forces dans un repère (application aux frottements)
y
x
0
Fy
Fx
−→
F
−→
N
−→
t
α
(Fx=F·cos α
Fy=F·sin α(positives ou négatives)
On note aussi :
(~
N=Fy·~
j
~
t=Fx·~
i
Si frottements : ~
t=~
Ffrott
Immobilité si Ffrott > µs·N
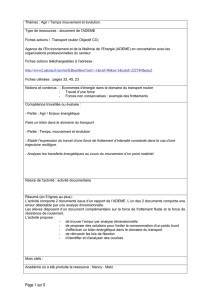
DOC 3 : Vitesse instantanée sur une direction
×
M1
×
M2
×
M3
×
M4
×
M5
~v3
Durée entre 2 points successifs τ
~v3dans le sens de −−−−→
M2M4et v3=M2M4
2τen
m.s−1
Au tableur : vi=xi+1 −xi−1
ti+1 −ti−1
=xi+1 −xi−1
2τ
(on supprime donc le premier et le dernier
point calculés !)
TSTI - Mécanique page 3 TP n◦- Date :
1
/
3
100%