Le produit scalaire

Le produit scalaire 1re STI2D, lycée Jean Moulin, Béziers
Le produit scalaire
1Le produit scalaire : introduction
1.a Notion de vecteur
un vecteur est un objet mathématique représenté par un segment orienté. Il est définit par
une direction, un sens et une longueur.
Définition 1
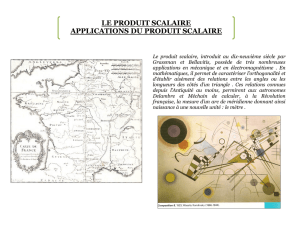
La translation qui transforme Aen A0est
l’application qui, à chaque point du plan,
associe le point M0tel que AA0M0Mest un
parallélogramme.
L’application qui transforme un point Aen un point A0est appelée translation de
vecteur −−→
AA0
La translation de vecteur −−→
AA0possède une infinité de représentants. On désigne alors par
une seule lettre (minuscule en général) le vecteur −−→
AA0. Par exemple : −→
u=
−−→
AA0
1.b Coordonnées et norme d’un vecteur
Théorème 1
Soient Aet Bdeux points de coordonnées xA
yAet xB
yBdans un repère (O;−→
i,−→
j).
Le vecteur −−→
AB a pour coordonnées xB−xA
yB−yA
Définition 2
Soient deux points Aet Bdu plan muni d’un repère orthonormé. On a alors :
AB =p(xB−xA)2+(yB−yA)2
La norme du vecteur −−→
AB noté
−−→
AB
, est par définition égale à la longueur de ce
vecteur :
−−→
AB
=AB
1.c Produit scalaire et travail d’une force
Activité 1
Notion de travail d’une force
On considère quatre situations, dans lesquelles on tente de tirer un chariot mobile
d’un point Overs un point A, avec la même intensité F.
OA
−→
F1OA
−→
F2
OA
−→
F3
OA
−→
F4
1. Dans quelle situation le travail est-il le plus efficace ? Dans laquelle ne l’est-il
pas ? Quels nombres très simples permettent de modéliser ces deux situations ?
2. Dans les deux autres cas, le travail n’est pas efficace, mais le chariot avance tout
de même. Si on voulait modéliser cette efficacité à l’aide d’un nombre, à quel
intervalle appartiendrait-t-il ? Que représente-il en fin de compte ? Sur quel axe
peut-on le lire et à quelle fonction trigonométrique fait-il référence ?
3. Si on voulait définir la notion de travail d’une force −→
Fle long du trajet OA, à
quoi devrait-il être proportionnel ?
2Projection orthogonale et produit scalaire
Définition 3
Soient A,Bet Ctrois points quelconques. Dans le triangle ABC, le pied de la hauteur
issue de Cest le projeté orthogonal de Csur (AB).
A B
C
H
A B
C
H
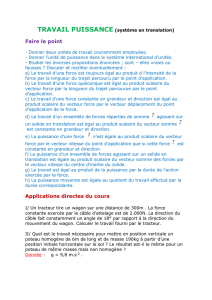
Grâce au théorème de Thalès, on peut démontrer que :
OM =1
ON =R
M
N
θ
O
sin(θ)
cos(θ)
Rsin(θ)
Rcos(θ)
les coordonnées des points Met Nsont :
M cos(θ)
sin(θ)!
N R cos(θ)
R sin(θ)!
1/3
A
A0
M
M0
I
Aest transformé en A0
Mest transformé en M0
/
/
//
//

Le produit scalaire 1re STI2D, lycée Jean Moulin, Béziers
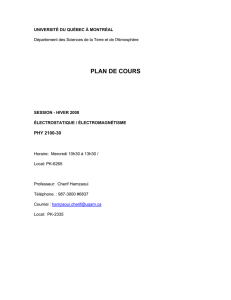
Soient trois points du plan O,Aet Bdistincts deux à deux. On s’intéresse au point H, projeté
orthogonal du point Bsur la droite (OA), orientée de Overs A.
On rencontre essentiellement deux cas de figure, selon que l’angle est aigu ou obtus (les
autres possibilités - angle nul, angle droit et angle plat - sont des cas particuliers).
O H A
−−→
OA
B
−−→
OB
−−→
OH
Angle aigu : −−→
OA et −−→
OH ont même sens
OA ×OB ×cos −−→
OA ,−−→
OB
| {z }
OH
=OA ×OH
OH A
−−→
OA
B
−−→
OB
−−→
OH
Angle obtus : −−→
OA et −−→
OH ont des sens contraires
OA ×OB ×cos −−→
OA ,−−→
OB
| {z }
−OH
=−OA ×OH
Ce nombre particulier OA ×OB ×cos −−→
OA ,−−→
OBest appelé produit scalaire, et on peut
généraliser les résultats.
Définition 4
On appelle produit scalaire de deux vecteurs −→
uet −→
vle nombre réel noté −→
u·−→
vtel
que :
−→
u·−→
v=
−→
u
×
−→
v
×cos −→
u,−→
v
Application 1
ABC est un triangle équilatéral de côté 4 cm, et Iest le milieu du segment [BC].
Calculer les produits scalaires suivants :
1. −−→
AB ·−−→
AC 2. −−→
AB ·−→
AI 3. −→
IA ·−→
BI
Théorème 2
Soient trois points du plan O,Aet Bdistincts deux à deux, et Hle projeté orthogonal
du point Bsur la droite (OA), orientée de Overs A.
si −−→
OA et −−→
OH sont de même sens, alors −−→
OA ·−−→
OB =OA ×OH
si −−→
OA et −−→
OH sont de sens contraire, alors −−→
OA ·−−→
OB =−OA ×OH
Application 2
ABCD est un carré de longueur de côté 2 cm. O est son centre. Calculer les produits
scalaires suivants :
1. −−→
AB ·−−→
AD 2. −−→
AB ·−−→
AC 3. −−→
BC ·−−→
BD 4. −−→
OB ·−−→
DC
3Expression analytique du produit scalaire
Théorème 3
Soient deux vecteurs −→
ux
yet −→
vx0
y0dans un repère orthonormé O;−→
i,−→
j.
−→
u·−→
v=xx0+yy0
Propriété 1
Produit scalaire et norme
Soit un vecteur −→
ux
ydans un repère orthonormé O;−→
i,−→
j.
−→
u
2=−→
u·−→
u=x2+y2et donc
−→
u
=px2+y2
Exercice 1
Soient A1
1,B4
2et C2
3. Placer ces trois points dans un repère orthonormé,
puis déterminer une valeur approchée de l’angle d
BAC.
4Orthogonalité et colinéarité
Théorème 4
Soient −→
ux
yet −→
vx0
y0deux vecteurs non nuls dans un repère orthonormé.
Orthogonalité :−→
u⊥−→
v⇔−→
u·−→
v=−→
0⇔xx0+yy0=0
Colinéarité :−→
ucolinéaire à −→
v⇔ ∃k∈R:−→
u=k−→
v⇔cos −→
u,−→
v=±1
2/3

Le produit scalaire 1re STI2D, lycée Jean Moulin, Béziers
Exercice 2
Soient A3
−1,B1
2,C−2
−1et D4
3. Calculer −−→
AB ·−−→
CD. Que peut-on en dé-
duire pour les droites (AB) et (CD) ?
Exercice 3
Soit ABCD un carré et Mle point de [BD] tel que −−−→
DM =1
4
−−→
DB. On note Het Kles
projetés orthogonaux respectifs de Msur (AB) et sur (AD).
Montrer que (CM) et (HK) sont orthogonaux.
5Propriétés du produit scalaire
Propriété 2
Symétrie et bilinéarité du produit scalaire
−→
u·−→
v=−→
v·−→
u(symétrie du produit scalaire)
−→
u·−→
v+−→
w=−→
u·−→
v+−→
u·−→
w
−→
u·k−→
v=k−→
u·−→
v=k−→
u·−→
v
Exercice 4
Produit scalaire et relation de Chasles
Soit ABCD un rectangle tel que AB =3 et BC =5. En décomposant les vecteurs −−→
AC
et −−→
BD, calculer −−→
AC ·−−→
BD.
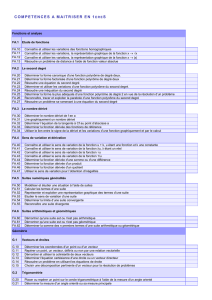
Exercice 5
Mouvement d’un solide sur un plan incliné avec frottements
On considère un solide qui glisse sur un support AB, incliné avec un angle α. Le
solide est soumis à des forces extérieures −−→
Fext, dont des forces de frottements −→
f.
Déterminer l’expression de l’intensité de cette force de frottement f, en appliquant le
théorème de l’énergie cinétique entre Aet B:
1
2mv2
B−1
2mv2
A=XWA→B−−→
Fext
Exercice 6
Soient A3
−1,B1
2,C−2
−1et D4
3. Calculer −−→
AB ·−−→
CD. Que peut-on en dé-
duire pour les droites (AB) et (CD) ?
Exercice 7
Soit ABCD un carré et Mle point de [BD] tel que −−−→
DM =1
4
−−→
DB. On note Het Kles
projetés orthogonaux respectifs de Msur (AB) et sur (AD).
Montrer que (CM) et (HK) sont orthogonaux.
5Propriétés du produit scalaire
Propriété 3
Symétrie et bilinéarité du produit scalaire
−→
u·−→
v=−→
v·−→
u(symétrie du produit scalaire)
−→
u·−→
v+−→
w=−→
u·−→
v+−→
u·−→
w
−→
u·k−→
v=k−→
u·−→
v=k−→
u·−→
v
Exercice 8
Produit scalaire et relation de Chasles
Soit ABCD un rectangle tel que AB =3 et BC =5. En décomposant les vecteurs −−→
AC
et −−→
BD, calculer −−→
AC ·−−→
BD.
Exercice 9
Mouvement d’un solide sur un plan incliné avec frottements
On considère un solide qui glisse sur un support AB, incliné avec un angle α. Le
solide est soumis à des forces extérieures −−→
Fext, dont des forces de frottements −→
f.
Déterminer l’expression de l’intensité de cette force de frottement f, en appliquant le
théorème de l’énergie cinétique entre Aet B:
1
2mv2
B−1
2mv2
A=XWA→B−−→
Fext
3/3
(bilinéarité du produit scalaire)
B
A
h
α
−→
R
−→
f
−→
P
(bilinéarité du produit scalaire)
B
A
h
α
−→
R
−→
f
−→
P
1
/
3
100%