Probabilités continues

Probabilités continues
Objectifs
XConcevoir et exploiter une simulation dans le cadre d’une loi uniforme.
XInterpréter l’espérance et l’écart type d’une loi uniforme dans le cadre d’un grand nombre de
répétitions.
XExploiter une simulation dans le cadre de la loi exponentielle.
XReprésenter graphiquement la loi exponentielle.
XCalculer une probabilité dans le cadre de la loi exponentielle.
XInterpréter l’espérance et l’écart type d’une variable aléatoire suivant une loi exponentielle.
XSavoir déterminer les paramètres des lois de aX +b,X+Yet X−Ydans le cas où Xet Ysont des
variables aléatoires indépendantes.
1 – Variable aléatoire continue
Soit Xune variable aléatoire définie sur un univers Ωet à valeurs dans R. Concrètement, Xpeut désigner par
exemple le diamètre d’une lentille, la longueur ou le poids d’un objet, la température en un point du globe, etc.
En théorie au moins, Xpeut prendre n’importe quelle valeur d’un intervalle de R: on dit que Xest une
variable aléatoire continue (par opposition au cas discret, où Xne prend par exemple que des valeurs isolées).
Si Xest une variable aléatoire continue,
la probabilité que Xsoit exactement égale à un nombre réel aest nulle.
pour tout a∈R,P(X=a) = 0.
Ainsi, plutôt que de considérer les évènements élémentaires « X=a», on s’intéresse par conséquent aux
évenèments « X∈[a;b]» qui admettent (en général) une probabilité non-nulle.
Si Xdésigne une variable aléatoire continue, on note :
•P(X6a)la probabilité de l’évènement « X∈]−∞;a]» ;
•P(X>a)la probabilité de l’évènement « X∈[a;+∞[» ;
•P(a6X6b)la probabilité de l’évènement « X∈[a;b]».
Du fait que P(X=a) = 0 pour tout a∈R, il n’y a pas lieu de distinguer les inégalités strictes des inégalités
larges. Par exemple : P(X6a) = P(X<a).
Pour décrire une variable aléatoire continue, on utilise sa fonction de répartition.
Fonction de répartition
Soit Xune variable aléatoire : la fonction de répartition de Xest la fonction Fdéfinie sur Rpar :
F:t7−→ P(X6t).
La connaissance de Fdétermine complètement la probabilité car :
•P(X6a) = F(a);
•P(X>a) = 1−F(a);
•P(a6X6b) = F(b)−F(a).
TS2 Systèmes Photoniques – 2016 / 2017 1 Lycée Fresnel - Paris

Densité de probabilité
Si la fonction de répartition Fd’une variable aléatoire continue est dérivable (et c’est en pratique souvent
le cas), on appelle densité de probabilité de Xla dérivée F′de F.
Calcul fondamental
Soit Fla fonction de répartition d’une variable aléatoire continue admettant une densité de probabilité f.
Alors :
P(a6X6b) = Zb
af(t)dt.
Démonstration
D’une part, P(a6X6b) = P(X6b)−P(X6a) = F(b)−F(a).
Par ailleurs, puisque Fest une primitive de f,
Zb
af(t)dt =[F(t)]b
a=F(b)−F(a).
Ceci montre bien que P(a6X6b) = Zb
af(t)dt.
Remarque
La probabilité P(a6X6b)est donc l’aire du domaine délimité par les droites d’équations x=aet x=b,
l’axe des abscisses et la courbe représentative de f.
t
ab
P(a6X6b) = Zb
af(t)dt
Propriétés
Soit Fla fonction de répartition d’une variable aléatoire continue Xet fsa densité de probabilité.
•Comme Fest croissante, fest positive.
•On a :
P(X>a) = Z+∞
af(t)dtet P(X6a) = Za
−∞f(t)dt.
•Le « poids total » d’une densité est égal à 1 : Z+∞
−∞f(t)dt=1 .
t
Z+∞
−∞f(t)dt=1
TS2 Systèmes Photoniques – 2016 / 2017 2 Lycée Fresnel - Paris

2 – Lien avec les statistiques
La distribution des fréquences d’une variable statistique continue est représentée par un histogramme par
classe : si l’on augmente indéfiniment le nombre d’observations tout en réduisant la largeur des classes, on
obtient une courbe qui représente une densité de probabilité.
0,2
0,4
0,6
f
3 – Espérance, variance, écart type
Définitions
Soit Xune variable aléatoire continue admettant une densité de probabilité f.
Sous réserve que les intégrales écrites aient un sens, on définit comme dans le cas discret l’espérance, la
variance et l’écart type de X.
L’espérance de X, notée E(X), vaut
E(X) = Z+∞
−∞t f (t)dt.
La variance de X, notée V(X), vaut
V(X) = Z+∞
−∞
(t−E(X))2f(t)dt.
L’écart type de X, notée σ(X)ou σ, est encore la racine carrée de la variance :
σ(X) = qV(X).
Propriétés
Les propriétés déjà rencontrées de l’espérance, variance et écart-type sont encore valables (à condition que
chacun des termes aient un sens) :
•E(aX +b) = aE(X) + b;
•E(X+Y) = E(X) + E(Y);
•V(aX +b) = a2V(X);
•σ(aX +b) = |a|σ(X);
•si Xet Ysont indépendantes, V(X+Y) = V(X) + V(Y).
TS2 Systèmes Photoniques – 2016 / 2017 3 Lycée Fresnel - Paris

4 – Loi uniforme sur un intervalle
Définition
On dit qu’une variable aléatoire suit la loi uniforme sur l’intervalle [a;b]lorsque sa densité de proba-
bilité fest donnée par :
f(t) =
1
b−asi a6t6b
0sinon
Cette loi correspond à l’idée intuitive d’équiprobabilité sur l’intervalle [a;b]: la densité de probabilité
est constante sur [a;b]et nulle en dehors.
t
f(t)
ab
f
1
b−a
Remarque
La quantité 1
b−aest un facteur de normalisation, n’ayant pour seule fonction que de garantir la condition
Z+∞
−∞f(t)dt=1 .
En effet :
Z+∞
−∞f(t)dt=Zb
af(t)dt=Zb
a
1
b−adt=t
b−ab
a
=b
b−a−a
b−a=1.
Propriétés
Si Xsuit la loi uniforme sur [a;b], alors : E(X) = a+b
2et V(X) = (b−a)2
12 .
Démonstration
En remarquant que fest nulle en dehors de l’intervalle [a,b]:
E(X) = Zb
at f (t)dt=Zb
at·1
b−adt=1
b−at2
2b
a
=b2−a2
(b−a)×2=(b−a)(b+a)
2(b−a)=a+b
2.
V(X) = Zb
a(t−E(X))2f(t)dt=Zb
at−a+b
22
·1
b−adt=1
b−a"1
3t−a+b
23#b
a
=1
b−a"1
3b−a+b
23
−1
3a−a+b
23#=1
3(b−a)"b−a
23
−a−b
23#
=1
3(b−a)×(b−a)3−(a−b)3
8=2(b−a)3
24(b−a)=(b−a)2
12 .
TS2 Systèmes Photoniques – 2016 / 2017 4 Lycée Fresnel - Paris

5 – Loi exponentielle
Définition
Soit λ∈]0 ; +∞[. On dit qu’une variable aléatoire suit la loi exponentielle de paramètre λlorsque sa
densité de probabilité fest donnée par :
f(t) =
λe−λtsi t>0
0sinon
t
f(t)
λ
Cette loi permet souvent de modéliser la durée de vie d’un objet.
On vérifie que
Z+∞
−∞f(t)dt=Z+∞
0
λe−λtdt=h−e−λti+∞
0=lim
t→+∞−e−λt−(−1) = 1.
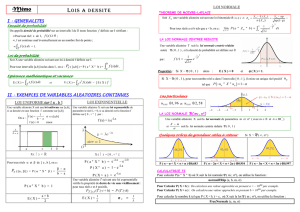
Rôle du paramètre λ
On a représenté sur le graphique ci-dessous les fonctions de densité de la loi exponentielle pour plusieurs
valeurs du paramètre λ.
1
2
3
4
1 2 3 4
t
f(t)
λ=4
λ=2
λ=1
λ=0, 5
TS2 Systèmes Photoniques – 2016 / 2017 5 Lycée Fresnel - Paris
 6
7
8
9
6
7
8
9
1
/
9
100%