Bernado DaCosta

Dimension moyenne
Bernardo Freitas Paulo da Costa
Laboratoire de Mathématiques d’Orsay, Université Paris-Sud 11
Introduction : la dimension topologique
L’idée la plus simple de la dimension nous vient par les espaces vectoriels, et dans ce cas elle correspond
très bien au concept de degrés de liberté que l’on possède. Dans le cas d’espaces plus généraux, il y
a plusieurs définitions possibles d’un nombre égal, pour les espaces vectoriels, à la dimension à laquelle
nous sommes habitués.
Une caractéristique intéressante de la dimension est d’agir comme une obstruction : c’est-à-dire, une
propriété qui permet de montrer que quelque chose est impossible. Ici, nous nous intéressons à l’existence
de certaines applications continues entre espaces métriques.
Définition 1. Un espace métrique (X, d)est une paire constitué par un ensemble Xet une fonction
d:X×X→R(dite la distance sur X) qui est positive, symétrique, vérifie l’inégalité triangulaire et
est nulle uniquement si ses arguments sont égaux.
Un compact dans (X, d)est un ensemble Koù toute suite possède une sous-suite convergeant vers un
point de K. Si Xest Rnavec la distance usuelle, cela est équivalent à que Ksoit fermée et borné.
Commençons avec un résultat qui relie continuité et une propriété purement ensembliste :
Proposition 1. Si Xet Ysont des espaces métriques compacts et f:Y→Xest bijective et continue,
alors c’est un homéomorphisme : l’inverse est aussi continue.
Alors, l’existence d’une application injective et continue f:Y→X, où Yest compact, montre
qu’il existe une partie de X(l’image de f) homéomorphe à Y. Si la dimension que nous construisons
ne dépend que de la structure topologique des espaces (et pas d’une métrique particulière choisie) et
qu’il est aussi raisonnable de demander que la dimension de Xsoit supérieure ou égale à celle d’une
quelconque de ses parties (on dit que la dimension est monotone), on déduit que dim Y≤dim X. La
contraposée de cette propriété est l’obstruction que fournit la dimension :
Proposition 2. Si dim Y > dim X, il n’existe pas d’application injective et continue de Yvers X.
D’autre part, si f:X→Yest surjective et continue, on ne peut pas conclure que dim X≥dim Y,
même dans le cas des espaces habituels : les courbes de Peano nous montrent qu’il est possible d’avoir
des applications surjectives et continues de [0,1] dans [0,1]npour tout n.
Premières étapes de la construction d’une courbe de Peano remplissant un carré.
Nous présentons ici une approche par étapes de la dimension : partant du cas des espaces vectoriels,
nous l’étendrons à des polyèdres, puis à espaces métriques plus généraux.
Définition 2. La dimension (usuelle) d’un espace vectoriel réel est le cardinal d’une (et donc toute)
base. (on insiste sur « usuelle » car la définition général peut aussi s’appliquer !)
La dimension (usuelle) d’un polyèdre est la plus grande dimension d’une de ses faces, la dimension
d’une face étant égale à celle de l’espace affine qu’elle engendre.
On pourrait essayer une définition de la dimension d’un espace Xcomme « la plus petite dimension
d’un polyèdre qui contient une image injective et continue de X». Le seul problème d’une telle défini-
tion est qu’il est impossible de savoir s’il existe au moins un polyèdre Pet une application injective et
continue f:X→P. C’est pourquoi on va assouplir la contrainte sur l’injectivité, avec une définition
en deux parties :
Définition 3. Soit ε > 0un nombre réel, et Xun espace métrique. La ε-dimension de X, notée
dimε(X), est la plus petite dimension (usuelle) d’un polyèdre Pdans lequel Xs’ε-injecte : il existe une
fonction continue f:X→Ptelle que le diamètre de f−1({p})soit toujours ≤εpour tout pdans P.
La dimension de X,dim(X), est la limite lorsque εtend vers zéro de ses ε-dimensions.
Intuitivement, l’ε-dimension de Xest la moindre complexité nécessaire pour le réprésenter avec ce niveau
de détail, si on pense à Pcomme une bonne approximation de Xàεprès.
Avec cette définition, si (X, d)est compact, son ε-dimension est toujours finie : à εfixé, il existe un
polyèdre Pet une fonction continue f:X→P ε-injective. De plus, la limite en ε→0est monotone,
donc existe toujours (mais peut être infinie !), et on vérifie qu’elle ne change pas si on remplace dpar
une métrique équivalente. Ainsi, la dimension pour Xcompact est bien définie, dépend uniquement de
sa topologie et, de plus, il est facile de montrer qu’elle satisfait la propriété d’obstruction que nous avons
indiqué plus en haut. Ouf !
Premiers exemples
Tout ensemble de points isolés est un polyèdre de dimension zéro. Ainsi, l’ensemble des rationnels
de l’intervalle [0,1] est aussi de dimension zéro, puisqu’on peut le ε-discrétiser — c’est à dire, trouver f
continue et ε-injective à valeurs dans un ensemble discret — en séparant sur les points irrationnels.
La 1-dimension du segment [0,1] est 0, une fonction constante étant 1-injective. Par contre, pour tout ε
plus petit que 1son ε-dimension ne peut pas être nulle : l’image de l’intervalle est un ensemble connexe,
et contient au moins deux points puisque la valeur en 0doit être différente de celle en 1, donc n’est pas
uniquement composée de points isolés.
La 1-dimension du carré de côté un est un, la projection sur un des côtés étant 1-injective. On peut
montrer que pour tout ε < 1, il n’est pas possible d’envoyer le carré de façon continue et ε-injective sur
une réunion de segments. Plus généralement, à l’aide du théorème de Brouwer on montre que
Proposition 3. Pour ε < 1, la ε-dimension de l’hypercube [0,1]nest égale à n.
Passant aux limites quand εtend vers zéro, on voit que la dimension d’un sous-ensemble convexe de Rn
(par exemple, la boule unité) est aussi la dimension (usuelle) du plus petit espace affine qui le contient :
on peut y trouver un hypercube de côté cet alors son ε-dimension pour ε < c sera sa dimension usuelle.
La dimension d’un polyèdre (pour cette nouvelle définition) est alors la plus grande dimension (encore
dans la nouvelle définition) d’une de ses faces, qui par le résultat précédent coïncide avec la dimension
usuelle qu’on donnerait à ce polyèdre. Cela est rassurant : les deux notions de dimension sont bien
cohérentes.
L’ensemble de Cantor
L’ensemble triadique de Cantor est construit récursivement en effaçant des segments de l’intervalle
[0,1], de longueur de plus en plus petite. Tout d’abord, on efface le tiers central 1
3,2
3, puis les tiers
1
9,2
9et 7
9,8
9au milieu des segments restants, et ainsi de suite. Les points qui ne seront pas effacés
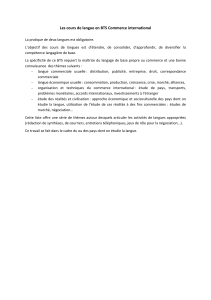
(des « miettes » sur la droite) forment l’ensemble de Cantor, C.
Les six premières étapes de la construction de l’ensemble de Cantor, et une approximation du graphe
d’une fonction surjective et continue vers l’intervalle [0,1].
Remarquons que les points aux extrémités d’un intervalle retiré (par exemple, 1
9et 2
9) ne seront jamais
touchés par cette procédure, ce qui assure que cet ensemble limite n’est pas vide. De plus, à chaque
étape on a un ensemble fermé, car on retire un ouvert à un fermé, et la limite est leur intersection,
qui est alors fermée. Ainsi, nous voyons que Cest compact.
On peut montrer que les nombres réels qui ne seront pas effacés sont ceux dont la représentation en
base 3ne contient pas de 1. Nous avons alors une application continue de l’ensemble {0,2}N+vers
C, qui à une suite (an)∞
n=1 associe le réel Pan3−n. C’est une bijection sur l’ensemble de Cantor, car
les représentations doubles (issues de 0, a1a2. . . an222 ... = 0, a1a2...(an+ 1)000 ...) n’appartiennent
jamais toutes les deux à {0,2}N+car l’une d’entre elles aura un 1dans la représentation ternaire.
Comme, à chaque étape de cette construction, la taille des intervalles est divisée par 3, si ε≥3−n
il est possible de contracter continûment tous les points qui sont dans un même intervalle à l’étape n
sur un point. Comme on peut faire cette ε-discrétisation quitte à aller suffisament loin en n, toutes les
ε-dimensions de l’ensemble de Cantor sont nulles, et donc sa dimension.
On peut utiliser l’ensemble de Cantor pour construire des courbes de Peano. Illustrons ce fait avec un
cas particulier très simple : l’escalier de Cantor, une fonction surjective et continue du Cantor, qui est
de dimension zéro, dans l’intervalle [0,1], qui est de dimension 1.
Commençons avec la représentation ternaire des éléments de C:x=Pan3−n. Or, l’ensemble {0,2}N+
est évidemment en bijection avec {0,1}N+, qui à son tour correspond aux nombres réels de l’intervalle
[0,1] par la représentation en base 2 ! La fonction ainsi obtenue, f(x) = Pan
22−n, composée des appli-
cations de Cvers {0,2}N+vers {0,1}N+vers [0,1], est continue et surjective. Mais en binaire on n’a
plus le même phénomène d’une seule représentation infinie, et donc la fonction ainsi obtenue n’est pas
injective : les deux extrémités de chacun des intervalles retirés ont la même image. Ce qui est rassurant :
si fétait bijective, sa fonction inverse serait elle aussi continue, et alors l’ensemble de Cantor serait
connexe, comme image continue d’un ensemble connexe !
Dimension moyenne : divisant infini par infini
On voudrait obtenir un invariant semblable à la dimension, c’est à dire une obstruction, cette fois pour
des espaces dont la dimension est infinie. Une idée naturelle pour étudier une suite qui tend vers l’infini
(les dimε(X)qui montrent que Xest bien de dimension infinie) est de voir la vitesse avec laquelle cette
suite croît. Mais ce faisant, vue la définition des dimε, on perdrait la propriété d’invariance métrique.
Une solution a été proposée par Gromov en 1999, où l’action d’un groupe fournit une nouvelle suite.
Définition 4. Une action d’un groupe Gsur un ensemble Xest une application
A:G×X→X: (g, x)7→ g·x
qui est compatible avec la structure de groupe de G: l’action de l’élément identité correspond à l’i-
dentité sur X, et l’action du produit gh sur xest obtenue par la composition des actions de get h:
(gh)·x=g·(h·x). Une partie Yde Xest stable pour l’action de Gsi A(G×Y) = Y.
On peut alors décrire complètement l’action d’un groupe en disant ce qu’elle fait pour chacun des élé-
ments d’une partie génératrice, l’action d’un élément quelconque gse déduisant d’une écriture comme
produit de générateurs. Par exemple, une action de Zest simplement la donnée d’une application in-
versible f:X→X, qui correspond à l’action de 1(l’inversibilité vient de l’existence de l’inverse −1,
f◦fcorrespond à 2, etc.).
Regardons l’image d’un élément xde Xpar l’action de Z, c’est à dire {. . . , (−1) ·x, x, 1·x, 2·x, . . .},
comme l’orbite de x, pensant aux entiers comme le temps. Soit maintenant une distance dsur X; on
peut alors calculer la « plus grande distance entre xet yde t= 0 jusqu’à l’instant n» et cela donne
une nouvelle distance,dn, sur X. Considérons alors la suite des « dimensions orbitales » dimε(X, dn),
où n→ ∞ ; comme d≤d1≤d2≤ · · · , il est possible que cette dimension augmente indéfiniment.
Moyennant quelques hypothèses techniques sur l’action de Z, nous arrivons à la définition suivante :
Définition 5. La ε-dimension moyenne de (X, d)(toujours supposé compact) par rapport à Zest
mdimε(X, d :Z) = lim
n→∞
dimε(X, dn)
n.
La dimension moyenne de Xpar rapport à Zest alors mdim(X:Z) = lim
ε→0mdimε(X, d :Z)et ne
dépend pas de la métrique dchoisie au départ, mais uniquement de la topologie de X.
Deux propriétés et un exemple
Il résulte directement de la définition de la dimension moyenne que
Proposition 4. Si Xest de dimension finie, alors sa dimension moyenne dim(X:Z)est nulle.
Si Y⊂Xest stable par l’action de Z, alors mdim(Y:Z)≤mdim(X:Z).
Ainsi, l’obstruction fournie par la dimension moyenne, qui découle de l’inégalité de monotonie ci-dessus,
est plus subtile que celle de la dimension, puisqu’elle doit aussi prendre en compte l’action du groupe sur
les espaces. Cela peut s’interpréter en disant que, en dimension infinie, la contrainte d’injectivité n’est
plus assez forte pour donner un sens au fait qu’un espace soit plus grand qu’un autre. On utilise donc
un groupe comme étalon pour comparer les deux infinis.
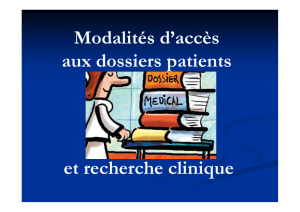
Voyons comment la dimension moyenne mesure la taille d’un espace. Soit Pun polyèdre borné de
Rn(donc compact), et considérons l’espace PZdes suites bi-infinies p= (...,p−1, p0, p1, p2,...)
de points de P. Si dPest la distance dans P, on définit une distance sur PZpar d(p,q) =
max
i∈Z2−|i|dP(pi, qi). Pour l’action de Zpar décalage des indices, c’est-à-dire, où le k-ième élément
de n·pest le (n+k)-ième élément de p, nous avons (PZ, d1) = (PZ, d)×P, et plus généralement
(PZ, dn) = (PZ, d)×Pn, ce qui montre que
Proposition 5. mdim(PZ:Z) = dim P.
...
210−1
...
−2
−1 0−2 1 2
......
0 1 2−1−2
......
Trois distances sur le cube de Hilbert [0,1]Z:d; translatée de dàt= 1 ;d1
Contrairement à la dimension topologique, la dimension moyenne peut être non entière : en choisissant
soigneusement des parties de PZqui sont stables par cette action de décalage, on peut fabriquer des
ensembles dont la dimension moyenne vaut un nombre réel (≤dim(P)) fixé a priori.
Congrès d’inauguration de la Fondation Mathématique Jacques Hadamard 17 & 18 mai 2011
1
/
1
100%