Équilibrage des machines tournantes : Cours technique

COURS DE TECHNIQUES DE SURVEILLANCE
Landolsi Foued Page
52
EQUILIBRAGE DES MACHINES TOURNANTES
I. Balourd et équilibrage
Le balourd une des principales causes de vibration sur les machines tournantes qui est très
connue de tous les automobilistes : lorsque vous faites changer les pneumatiques de votre voiture,
il est très usuel de demander l’équilibrage des roues. Si cette opération n’est pas faite, un «
tremblement » très désagréable est ressenti dès que vous atteignez une vitesse élevée. Ceci est dû
au phénomène de balourd
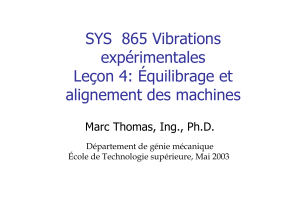
Considérons un disque de centre de
gravité G tournant autour d’un axe (O,
z
r
). Si
le centre G coïncide avec l’axe de rotation on
dit que le disque est équilibré [Figure 5.1]. Si
une masse m est ajoutée en périphérie du
disque, on crée une irrégularité qui a pour
effet de modifier la position du centre de
gravité G. On dit dans ce cas, que le disque
présente un balourd.
Un balourd est par définition, une répartition irrégulière de la masse d’un rotor lors de sa
rotation autour d’un axe. L’équilibrage est le procédé qui vise à compenser cette mauvaise
répartition par ajout ou enlèvement de masses connues en des endroits déterminés du rotor.
La représentation de la figure 6.1 est une simplification. En pratique, plusieurs défauts
peuvent apparaître sur un même rotor mais ils ont pour effet de déplacer le centre de gravité G et,
dans le cas du disque, il suffit d’ajouter une seule masse pour ramener le centre de gravité en
coïncidence avec l’axe de rotation.
II. Les causes du balourd
D’origine toute pièce présente un balourd plus ou moins important, dont les principales
causes sont :
• Défauts de conception : Tolérance trop large sur la cotation des pièces (excentricité, jeu,
etc…), Asymétrie de rotation (vilebrequin, mandrin, etc …).
• Défauts de fabrication : Mauvaise homogénéité des matériaux utilisés (soufflure, inclusions,
SANS BALOURD
AVEC BALOURD
Figure 6.1
:
Modélisation d’un balourd

COURS DE TECHNIQUES DE SURVEILLANCE
Landolsi Foued Page
53
etc…), Tolérances d’usinage (circularité, concentricité, etc …).
• Défauts de montage : Asymétrie du montage des pièces (montage par clavette, goupilles,
etc…), Pièces mal fixées ou montées avec jeu.
• Défauts de service : Usure due à un enlèvement de matière (meule) , Modification de la
masse par dépôt (encrassement, corrosion, etc…), Influences thermiques.
III. Les effets de balourd
Le balourd crée dans les pièces des forces centrifuges
générant des vibrations au niveau des paliers susceptibles
d’accélérer leur dégradation. Sous l’action permanente de ces
vibrations, les éléments d’assemblage peuvent se rompre.
Les forces centrifuges (proportionnelles au carré de la
vitesse de rotation) nécessitent un équilibrage très précis
d’autant plus nécessaire que la pièce est utilisée à une vitesse
de rotation élevée [Figure 6.2].
IV. Les différents types de balourd
Nous venons de voir que l’ajout d’une seule masse permet d’équilibrer un rotor plan
(exemple : disque, ventilateur…). Dans le cas où le rotor a une longueur non négligeable, plusieurs
types de balourds peuvent se produire.
Avant tout, il est nécessaire d’introduire une nouvelle notion : tout solide a tendance à
tourner plus facilement autour d’un axe qui ne dépend que de la répartition de ces masses. Cet
axe est appelé axe principal d’inertie. Il passe par le centre de gravité.
Un rotor est équilibré lorsque l’axe de rotation coïncide avec l’axe principal d’inertie. Tout
ajout de balourd va changer la répartition des masses et donc modifier la position de l’axe
principal d’inertie. Selon sa position relative par rapport à l’axe de rotation on distingue les
différents types de balourd.
1. Balourd statique
C’est l’état tel que le balourd est situé au milieu du rotor. L’axe principal d’inertie (∆) est
uniquement déplacé parallèlement par rapport à l’axe de rotation de l’arbre [Figure 6.3]. En
pratique, il correspond essentiellement aux rotors sur lesquels le déséquilibre est prépondérant
dans un seul plan de
diamètre important
(ventilateur, disque). Dans ce
cas, une seule masse
disposée diamétralement
opposée au balourd permet
d’équilibrer le rotor
(équilibrage en un seul plan).
Figure 6.2 :
Force centrifuge
due au balourd
F = m r ω
2
Figure 6.3 :
Balourd statique
∆ : Axe principal d’inertie.
Z : Axe de rotation.
∆

COURS DE TECHNIQUES DE SURVEILLANCE
Landolsi Foued Page
54
2. Couple de Balourd
Le centre de gravité est bien sur l’axe de rotation : l’équilibre statique est réalisé, mais les
deux axes ne coïncident pas. L’axe
central d’inertie (∆) coupe l’axe de
rotation de l’arbre au centre de gravité
[Figure 6.4]. Il est nécessaire d’installer
au minimum deux masses pour
équilibrer ce rotor : par exemple deux
masses diamétralement opposées à m
1
et à m
2
(équilibrage en deux plans).
3. Balourd dynamique
C’est une combinaison des deux balourds ci-dessus. Le
centre de gravité n’est pas sur l’axe de rotation et cet axe
n’est pas parallèle à l’axe principal d’inertie [Figure 6.5]. Il
faut en général deux masses pour rattraper ce type de
déséquilibre (équilibrage en deux plans).
4. Unité du balourd
Considérons un rotor équilibré de masse M [Figure 6.6].
L’ajout d’une masse m sur un rayon r déplaçait son centre de
gravité G d’une distance e appelée excentricité. Le balourd B, ainsi
crée, est défini par :
B = m . r = M . e
[g.mm] [g.mm] [Kg.µm]
V. Principes généraux de l’équilibrage
1. Masse et Force
On peut assimiler le balourd à une force centrifuge F,
tournante générée par une masse de déséquilibre m, située à la
distance r du centre de gravité G de l’arbre tournant à la vitesse
ω
ωω
ω [Figure 6.7]. La valeur de cette force est :
F = m r ω
ωω
ω²
Pour une vitesse de rotation donnée, et pour un rayon
donné, il y a donc une relation linéaire entre la masse de
déséquilibre et la force de balourd correspondant. La procédure d’équilibrage nécessiterait de
Figure 6.5 :
Balourd dynamique
Figure 6.4 :
Couple de balourd
∆ : Axe principal d’inertie.
Z : Axe de rotation.
Figure 6.6 :
Balourd
r
e
Figure 6.7
:
Balourd et force
centrifuge correspondante
F
ω

COURS DE TECHNIQUES DE SURVEILLANCE
Landolsi Foued Page
55
déterminer cette force et de repérer la position radiale de la masse du déséquilibre. Cependant,
la force n’est pas mesurable, nous allons donc nous intéresser au mouvement de palier qu’elle
génère (vibration), qui pour sa part est mesurable de manière simple.
2. Vibration
Sous l’effet du balourd, le palier aura un mouvement autour de sa position d’équilibre
(représentée par sa position, machine à l’arrêt). Projeté sur un axe, ce mouvement aura l’allure
indiquée sur la figure 6.8. Les repères 1, 2, 3 et 4 indiquent les correspondances entre la position
verticale du palier et la position angulaire de la masse de déséquilibre. Ce mouvement est la
vibration du palier généré par le balourd. Il est périodique et sinusoïdal, à la période d’un tour, ou
à la fréquence de rotation f
0
.
En conclusion, l’amplitude de la vibration générée par le balourd est directement
proportionnelle au balourd, c'est-à-dire à la masse de déséquilibre.
Figure 6.8 :
Signal vibratoire généré par le balourd
3. Notion De Phase
Nous allons maintenant s’intéresser au repérage de la position radiale de la masse du
déséquilibre. Il serait intéressant de connaître la position de l’arbre lorsque, par exemple, la
vibration passe par un maximum. On utilise pour cela un top-tour.
L’objectif d’un « top tour » est de générer une référence de rotation d’un arbre. On peut
réaliser celle-ci par la mise en place d’un scotch brillant à un endroit donné de la périphérie de
l'arbre, utilisé comme repère de position ; une cellule photoélectrique placée radialement à l’arbre
délivrera alors une impulsion électrique à chaque passage du scotch [figure 6.9].
La mesure simultanée de l’amplitude de la vibration générée par le balourd et des impulsions
générées par le top tour permet de déterminer le décalage temporel séparant ces deux signaux.
Afin d’adapter cette information de décalage temporel à une position radiale de l’arbre, on
ramène la durée d’un tour (période) à un angle de 360°. Le « retard » de la vibration par rapport
au top tour correspondra alors à un angle, en degrés ; c’est ce que l’on appelle la phase entre le
top tour et la vibration mesurée.
En conclusion, la mesure de la phase de la vibration générée par le balourd, par rapport à un
top tour, donne une information de repérage de position de la masse de déséquilibre. Cette
Temps
Déplacement
M

COURS DE TECHNIQUES DE SURVEILLANCE
Landolsi Foued Page
56
position angulaire est décalée d’un « angle » donné par rapport à la phase mesurée.
Figure 6.9
:
Décalage temporel vibration/top tour
Dans ce qui suit chaque mesure de vibration V est constituée d’une mesure d’amplitude v et
d’une mesure de phase φ.
VI. Pratique de l’équilibrage
1. Equilibrage sur machine
L'équilibrage sur machine à équilibrer est pratiqué lorsque l'origine du balourd est la rupture
ou tout au moins la détérioration d'une partie du rotor, il est évident qu'il faut d'abord le remettre
en état avant de l'équilibrer, il faut donc le démonter. De plus si le balourd a créé des vibrations
très importantes, il y a des risques que les roulements ou la structure aient été endommagés.
2. Equilibrage sur site
L'équilibrage d'un rotor tournant sur ses propres paliers, sans être démonté, est appelé
équilibrage sur site. Il s'agit de la méthode d'équilibrage la plus pratiquée par le personnel de la
maintenance. En effet ce type d'équilibrage offre de nombreux avantages par rapport à
l'équilibrage en atelier :
• Le rotor est équilibré dans des conditions de fonctionnement normales (charges,
températures, vitesse.. .).
• Le démontage, le réassemblage et le réalignement ne sont pas nécessaires.
• Les temps d'arrêt sont considérablement réduits.
Tem
ps
Déplacem
ent
Δ
T
 6
7
8
6
7
8
1
/
8
100%