Correction DS4

DS 4 : Etude du mouvement d’un solide indéformable
CORRECTION
Etude des mouvements des différentes parties d’une grue
Sur un chantier de construction on utilise une grue pour déplacer des objets très lourds. Certaines parties de la grue
sont prévues pour effectuer des mouvements de translation, d’autres pour effectuer des mouvements de rotation.
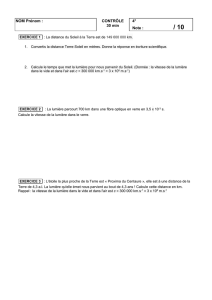
Une grue est principalement composée d’une tour, d’une flèche, d’une contre-flèche, d’une cabine, d’un chariot et de lests.
(Voir schéma ci-dessous)
La longueur de la flèche de la grue étudiée est de 16 m.
1. Définir le mouvement de translation d’un solide.
Un solide se déplace en translation si un segment quelconque joignant deux de ses points parallèle à lui-même
au cours du mouvement
2. Quelles parties de la grue peuvent effectuer des mouvements de translations ?
La charge et le chariot de la grue peuvent effectuer des mouvements de translation.
3. Définir le mouvement de rotation d’un solide.
Un solide est animé d’un mouvement de rotation si tous les points du solide situés en dehors de l’axe de
rotation décrivent des arcs de cercle concentriques.
4. Quelles sont les parties de la grue pouvant effectuer des mouvements de rotation ?
La flèche et la contre-flèche effectuent des mouvements de rotation autour de l’axe (∆
∆∆
∆
)
5. Une charge est maintenue à une hauteur constante par la grue qui tourne autour de son axe de rotation (∆
)
avec une vitesse angulaire ω
constante.
a) Quelle est la trajectoire du centre d’inertie G de la charge telle qu’elle est vue par un observateur sur
le sol ?
Pour un observateur lié au sol le centre d’inertie G de la charge décrit une trajectoire circulaire.
b) Quelle est la trajectoire du centre d’inertie G de la charge telle qu’elle est vue par le conducteur de la grue
dans sa cabine, celle-ci tournant avec la grue ?
Pour le conducteur de la cabine, la charge est immobile. Ceci illustre la notion de relativité du mouvement
par rapport au référentiel.
Axe de rotation (
∆)

c) La flèche de la grue effectue une rotation de 30° en 4,2 s autour de son axe de rotation (∆
).
Calculer la valeur de la vitesse angulaire ω
de la grue.
Par définition, la vitesse angulaire ω
ωω
ω
du système [flèche + contre-flèche] est :
ω
ωω
ω
= α
αα
α
∆
∆∆
∆
t
A.N :
30° correspondent à
π
ππ
π
6
66
6 rad
Soit
:
ω
ωω
ω
=
π
ππ
π
6
66
6
4
44
4,2
22
2
=
1,2.10
-1
rad.s
-1
d) En déduire la période T et la fréquence f de rotation.
La période T est la durée qui correspond à un tour complet, soit :
ω
ωω
ω
=
2
22
2
π
ππ
π
T
⇒
⇒⇒
⇒
T
=
2
22
2
π
ππ
π
ω
ωω
ω
A.N : T = 2π
2π2π
2π
1
11
1,2
22
2.10
1010
10
−
−−
−1
11
1
= 52 s
Par définition la fréquence est reliée à la période par la relation :
f = 1
11
1
T
A.N : f = 1
52 = 1,9.10
-2
Hz
e) Calculer la valeur de la vitesse linéaire v au milieu et en bout de la flèche.
Par définition la vitesse linéaire v de rotation d’un point situé à la distance R de l’axe de rotation est :
v = Rω
ωω
ω
En milieu de flèche un point est situé à 8 m de l’axe de rotation (∆
∆∆
∆
)
et en bout de flèche il est situé à 16 m.
A.N :
v
1
= 8 x 1,2.10
-1
= 0,96 m.s
-1
en milieu de flèche.
v
2
= 16 x 1,2.10
-1
= 1,9 m.s
-1
en bout de flèche.
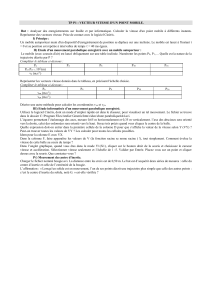
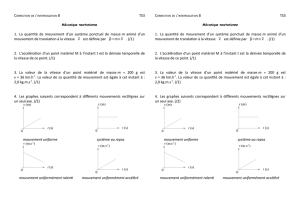
f) Représenter les vecteurs-vitesses en milieu et en bout de flèche en choisissant une échelle adaptée.
On représentera la flèche par un segment de 4 cm de longueur tournant dans le sens inverse des aiguilles d’une
montre.
Représentation des vecteurs-vitesse.
Echelle de vitesse :
1 cm pour 1 m.s
-1
→
→→
→
v
vv
v
1
→
→→
→
v
vv
v
2
(∆)

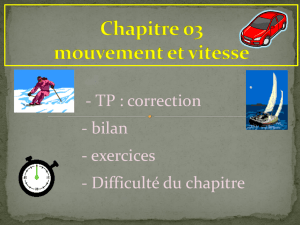
6. Une chronophotographie du centre d’inertie G de la charge, lorsque seul le chariot de la grue se déplace (celle-ci
ne tournant pas autour de l’axe (∆)), est représentée ci-dessous. L’intervalle de temps séparant deux positions
successives du centre d’inertie G est ∆t = 2,0 s. L’origine des dates est t
0
= 0 s coïncide avec l’origine G
0
du
centre d’inertie de la charge.
a) Quelle est la nature du mouvement du centre d’inertie G de la charge ?
Le centre d’inertie de la charge est animé dans ces conditions d’un mouvement de translation rectiligne
accéléré, car la distance parcourue pendant des intervalles de temps égaux augmente au cours du temps.
b) Déterminer l’échelle spatiale du document.
Comme on peut le voir sur le document ci-dessus, 100 cm sont représentés par une longueur de 2 cm.
Sur le document En réalité
2 cm 100 cm
1 cm x
D’où : x = 1 x 100
2 = 50 cm soit x = 0,5 m
c) Calculer la vitesse moyenne v
m
du centre d’inertie de la charge entre les dates t
0
et t
5
.
Exprimer le résultat en m.s
-1
et km.h
-1
.
Par définition : v
m
= G
0
00
0
G
5
55
5
5∆
5∆5∆
5∆t
A.N : v
m
= 7,4 x 0,5
5 x 2,0 = 0,37 m.s
-1
v
m
= 0,37 x 3,6 = 1,3 km.h
-1
d) Calculer les vitesses instantanées v(t
1
), v(t
2
), v(t
3
) et v(t
4
) en m.s
-1
et compléter le tableau suivant :
Par définition :
v(t
i
) = M
i-1
M
i+1
t
i+1
– t
i-1
D’où:
v(t
1
) = G
0
00
0
G
2
22
2
2∆
2∆2∆
2∆t = 1,85 x 0,5
2,0 x 2 = 0,23 m.s
-1
v(t
2
) = G
1
11
1
G
3
33
3
2∆
2∆2∆
2∆t = 2,6 x 0,5
2,0 x 2 = 0,32 m.s
-1
v(t
3
) = G
2
22
2
G
4
44
4
2∆
2∆2∆
2∆t
= 3,35 x 0,5
2,0 x 2 = 0,42 m.s
-1
v(t
4
) = G
3
33
3
G
5
55
5
2∆
2∆2∆
2∆t = 4,1 x 0,5
2,0 x 2 = 0,51 m.s
-1
t
t
1
= 2,0 s
t
2
= 4,0 s
t
3
= 6,0 s
t
4
= 8,0 s
v(t)
0,23 m.s
-
1
0,32 m.s
-
1
0,42 m.s
-
1
0,51 m.s
-
1

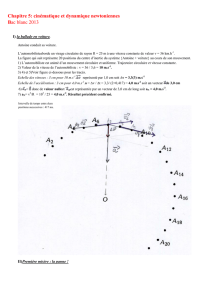
e) Tracer sur le papier millimétré ci- dessous le graphique v = f(t), représentant l’évolution de la vitesse du centre
d’inertie G de la charge en fonction du temps.
Echelle : 1 cm pour 1 s et 1 cm pour 0,05 m.s
-1
f) Quelle est la nature de la courbe obtenue ?
La courbe obtenue est une demi-droite ne passant par l’origine du repère.
g) Par une méthode graphique, déterminer les vitesses instantanées v(t
0
) et v(t
5
).
Une lecture du graphique permet de déterminer une valeur approchée de chacune des deux vitesses
instantanées.
v(t
0
) = 0,13 m.s
-1
v(t
5
) = 0,61 m.s
-1
h) En expliquant votre méthode, déterminer l’équation de la représentation graphique obtenue.
La courbe représentative v = f(t) est une fonction affine de la forme v(t) = a.t + b
(y = a.x + b en Maths).
L’ordonnée à l’origine b correspond à la vitesse à l’instant t = 0 s, soit b = v(t
0
) = 0,13 m.s
-1
.
Le facteur a correspond au coefficient directeur de la droite :
D’où :
a = v(t
4
) – v(t
1
)
t
4
– t
1
= 0,51 – 0,23
8,0 – 2,0 = 4,7.10
-2
L’équation de la droite est alors :
v(t) = 0,13.t + 4,7.10
-2
Remarque : Les valeurs trouvées sont des valeurs approximatives à cause des incertitudes de mesures et de lectures
graphiques.
0 1 2 3 4 5 6 7 8 9 10 11 12
t(s)
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
v(m.s
-
1
)
v(t
0
)
v(t
5
)

1
/
5
100%