Modélisation, Identification Expérimentale et Commande d`un

Ecole Nationale des Arts et Métiers
_____________
Master Recherche
Energie Electrique et Développement Durable
_________________
Modélisation, Identification Expérimentale et
Commande d'un Moteur Linéaire Synchrone à
Aimants Permanents
_________________
Détermination des inductances
_________________
Synthèse Bibliographique
_________________
Julien GOMAND
Le 26 janvier 2005
Année Universitaire 2004 - 2005
Responsables :
M. P.J. BARRE, Maître de conférences, L2EP, Equipe de Recherche Technologique CEMODYNE
M. F. PIRIOU, Professeur des universités, L2EP, Equipe de Recherche Technologique MECOSYEL
M. M. TOUNZI, Maître de conférences, L2EP, Equipe de Recherche Technologique MECOSYEL

Sommaire
Introduction générale......................................................................................................3
I Modélisation analytique...........................................................................................4
I.1 Modèle de la matrice inductance.......................................................................................... 4
I.2 Réseau de réluctances............................................................................................................ 5
II Calcul de la matrice inductance par la méthode des éléments finis....................7
III Identification expérimentale de la matrice inductance.....................................9
III.1 Introduction............................................................................................................................ 9
III.2 Méthodes classiques............................................................................................................... 9
III.2.1 Analyse harmonique ...................................................................................................... 10
III.2.1.1 Mesure de la fréquence de résonance en oscillation forcée................................... 10
III.2.1.2 Mesure de la fréquence de résonance en oscillation libre...................................... 10
III.2.2 Analyse temporelle ........................................................................................................ 10
III.2.2.1 Essai en sinusoïdal ................................................................................................. 10
III.2.2.2 Essai indiciel .......................................................................................................... 11
III.2.3 Limites des méthodes classiques ................................................................................... 11
III.2.3.1 Problème du mouvement résiduel de la partie mobile........................................... 11
III.2.3.2 Problème de la saturation du circuit magnétique :................................................. 13
III.3 Exploitation des signaux M.L.I........................................................................................... 15
III.4 Injection d'un signal haute fréquence................................................................................ 16
Conclusion......................................................................................................................17
Bibliographie..................................................................................................................18

3
Introduction générale
Le contexte général de cette étude est le moteur linéaire pour des systèmes de
positionnement linéaire de précision à dynamique élevée, utilisé dans des applications telles que la
mise en place de composants électroniques sur circuits imprimés ("pick & place") [Cassat 2003].
L'augmentation des rendements de production implique de réduire au maximum les temps
de cycles, sans que ce soit au détriment de la précision du positionnement. Etant donné que les
accélérations mises en jeu sont très élevées pour de faibles distances de déplacement, les machines
d'entraînement des axes fonctionnent la plupart du temps en régime transitoire. Pour diminuer l'erreur
de poursuite, il est nécessaire d'augmenter la dynamique de chaque axe et donc d'employer des
actionneurs très performants permettant de limiter au maximum les masses embarquées : les
actionneurs linéaires à entraînement direct.
Cependant, l'optimisation des performances de ce type d'actionneurs présente certaines
difficultés relatives aux caractéristiques dimensionnelles des moteurs linéaires comme l’asymétrie, la
longueur finie du primaire ou encore les effets d’encoches. Ces particularités sont à l'origine
d’ondulations parasites de la force de poussée dont il serait souhaitable de s'affranchir par la
commande. Pour cela, il est indispensable de modéliser le plus finement possible les différents
phénomènes mis en cause. Une grande partie de cette démarche de modélisation a déjà été menée par
les membres de l'équipe Commande et Entraînement des Machines-Outils à DYNamique Elevée
(CEMODYNE) du Laboratoire d'Electrotechnique et d'Electronique de Puissance (L2EP) de Lille
[Askour 2002], [Zeng 2002], [Remy 2003], [Remy 2004].
L'équation de la force de poussée fait intervenir les inductances de la machine
[Madani 1995]. Celles-ci sont susceptibles de varier en fonction de l'état magnétique des tôles qui
constituent le primaire de l'actionneur, et donc en fonction de la position occupée par ce dernier vis-à-
vis des aimants. Par conséquent, nous nous proposons ici de poursuivre la démarche de modélisation
en s'intéressant aux variations des inductances de la machine en fonction de la position et du courant.
Nous commencerons par établir un lien entre un modèle analytique avec harmoniques de la
matrice inductance et la géométrie de l'actionneur. Afin d'obtenir une expression analytique des
inductances, nous introduirons le modèle par réseau de réluctances. Nous poursuivrons par le calcul
des composantes de la matrice inductance à l'aide d'un calcul par éléments finis avant de nous
intéresser aux différentes méthodes expérimentales à mettre en oeuvre pour l'identification des
paramètres du modèle.
Notons que nous travaillons sur un actionneur linéaire synchrone à aimants permanents à
pôles lisses (LMD10-050 d'Etel) et qu'il n'est pas courant de s'intéresser aux variations d'inductances
pour une telle machine. C'est pour cette raison que la bibliographie qui sera utilisée pour les méthodes
expérimentales correspondra plutôt à des machines pour lesquelles la saillance est un effet important.

4
Avant de chercher à l'identifier, commençons par poser le modèle de la matrice inductance.
I Modélisation analytique
I.1 Modèle de la matrice inductance
L'expression générale de la matrice inductance découle de l'étude de la géométrie de la
machine étudiée. A titre d'exemple, nous pouvons trouver dans la littérature [Madani 1995] :
()
() () ( )
06 12
06 12
cos 6 cos 12
ddd d
qqq q
LLL L
LLL L
θ
θ
θ
θ
⎛⎞
⎛⎞⎛⎞ ⎛ ⎞
=+⋅⋅+⋅ ⋅
⎜⎟
⎜⎟⎜⎟ ⎜ ⎟
⎝⎠⎝⎠ ⎝ ⎠
⎝⎠
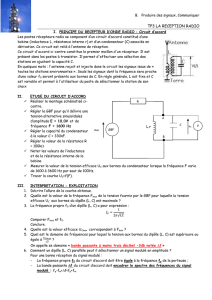
Pour une machine tournante à pôles saillants, il est possible de tracer l'allure de la
perméance d'entrefer par unité de surface 1
pds ds
==
⋅
(vue du stator) pour un angle électrique θe
donné, sur une période électrique [Seguier 1994] :
Figure I-1 : Perméance d'entrefer par unité de surface d'une machine à pôles saillants "développée"
Sa décomposition en séries de Fourier est donc de la forme :
()
02
1
cos 2
k
k
pp p k
θ
∞
=
=+ ⋅ ⋅
∑
L'induction magnétique crée par chaque enroulement est déduite des expressions des forces
magnétomotrices ε de chacun des trois enroulements et de la perméance d'entrefer par unité de surface.
Les flux dans chaque phase s'obtiennent par intégration de l'induction magnétique sur la surface
d'entrefer :
[
]
[
]
e
s
B
ds
φ
=
⋅
∫
Ce qui permet de remonter aux inductances en divisant le flux par le courant :
[]
()
(
)
(
)
() ()
()
()
22 2
000
00 0 2 2 2
000
22
22
cos 2 cos 2 cos 2
33
22
cos2 cos2 cos2
33
2
cos 2 cos 2
3
kk k
kk k
kk
aa ab ac
aa ab ac
ba bb bc ba bb bc
ca cb cc
ca cb
LkM k M k
LMM
LM L M M k L k M k
MM L Mk M
ππ
θθ θ
ππ
θθ θ
π
θ
⎛⎞⎛⎞
⋅⋅ ⋅⋅+ ⋅⋅−
⎜⎟⎜⎟
⎝⎠⎝⎠
⎡⎤
⎢⎥
⎛⎞⎛⎞
=+⋅⋅+⋅⋅−⋅⋅
⎜⎟⎜⎟
⎢⎥
⎝⎠⎝⎠
⎢⎥
⎣⎦
⎛⎞
⋅⋅− ⋅
⎜⎟
⎝⎠
()
()
2
1
2
cos 2 3
k
k
cc
kLk
π
θθ
∞
=
⎡ ⎤
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎛⎞
⎢ ⎥
⋅⋅⋅+
⎜⎟
⎢ ⎥
⎝⎠
⎣ ⎦
∑
Une fois la forme générale du modèle posée en décomposition en séries de Fourier, les
différentes méthodes de calcul et d'identification serviront à renseigner ce modèle. Il s'agira d'attribuer
des valeurs aux différents coefficients du modèle.

5
Voyons maintenant comment calculer analytiquement les inductances propres et les
mutuelles inductances de la machine.
I.2 Réseau de réluctances
L'intérêt de cette méthode est qu'elle permet d'obtenir une expression analytique des
composantes de la matrice inductance à partir des dimensions géométriques de la machine.
Son principe est de partir de la structure de la machine et d'en réaliser le schéma équivalent
électrique équivalent en réseau de réluctance [Polinder 2003] :
Figure I-2 : Structure et réseau de réluctances d'un actionneur linéaire à aimants permanents
Chaque réluctance est fonction des dimensions géométriques de la partie de circuit
magnétique qu'elle représente. Chaque branche comporte deux sources magnétomotrices : la première
correspond à un enroulement traversé par un courant, la seconde correspond à tout ou partie d'un
aimant, en fonction de la position occupée par le primaire.
En faisant l'hypothèse que les effets d'extrémité sont négligeables [Polinder 2003], la
simplification du schéma ainsi obtenu est possible en utilisant les règles employées pour les schémas
électriques :
Figure I-3 : Réseau de réluctances simplifié
Nous obtenons un schéma
équivalent constitué de trois branches, chacune
correspondant à une phase de l'actionneur.
En faisant l'hypothèse de linéarité
du circuit magnétique, le calcul de chaque
réluctance pour une position donnée est
simplifié. Dans le cas contraire, le calcul des
réluctances des dents saturées devient délicat et
nécessite un algorithme itératif. En effet, la
réluctance dépend de la perméabilité du
matériau, elle même fonction du champ
magnétique, ce dernier se calculant à partir de
la réluctance.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%