ESE23_Audier1

1
MF Audier –Avril 2009
Contenu du cours
ESE22 :Formation, capture et restitution des images
ESE22 :Formation, capture et restitution des images
mardi 07 avril 2009 (8h30 - 12h15)
Caractérisation des images dans le visible
•Contraste en fonction de la bande spectrale et des conditions atmosphériques : annulation,
inversion de contraste.
•Paramètres de performance MRC: Optique, Détecteur, Stabilisation, Visualisation,
Observateur...
•Introduction au bilan de portée
mardi 21 avril 2009 (8h30 - 12h15)
Acquisition et restitution dans le visible
•système de télévision
•Photographie numérique
•caractéristiques et défauts des différents capteurs : tubes de prises de vue, caméras CCD,
caméras CMOS, intensificateurs, EBCCD/CMOS
•En annexe: Bases de la caractérisation d’un détecteur

2
MF Audier –Avril 2009
Systèmes d’imagerie
ESE22 :Formation, capture et restitution des images
ESE22 :Formation, capture et restitution des images

3
MF Audier –Avril 2009
Objectifs
imagerie passive
Détection, Reconnaissance, Identification visuelle
observation en temps réel via une visualisation
Applicable à toutes bandes spectrales (visible, PIR, IR2, IR3)
Estimer les performances opérationnelles
(portées) d’un équipement d’imagerie
Dimensionner
un équipement d’imagerie
ESE22 :Formation, capture et restitution des images

4
MF Audier –Avril 2009
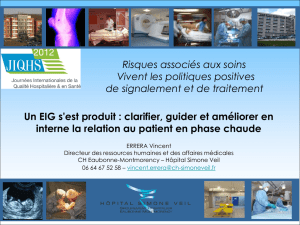
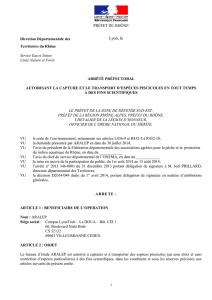
Chaine Image
ESE22 :Formation, capture et restitution des images
Source
capteur visuel
observateur
scène
Optique
Collectrice de flux
Détecteur
Absorbe les photons et génère des électrons puis les convertit en tension
Unités de traitement et de mise en forme de l’image
Système de visualisation

5
MF Audier –Avril 2009
Contenu
1. Modélisation d’une scène
réflexion des sources naturelles de rayonnement
lien entre réflexion et rayonnement solaire
propagation atmosphérique
bilan photométrique
1. Modélisation d’un capteur
1. sensibilité et résolution
2. stabilisation
3. optique
4. détecteur
5. visualisation
6. observateur
7. notion de fréquence spatiale
8. notion de FTM
ESE22 :Formation, capture et restitution des images
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
1
/
85
100%