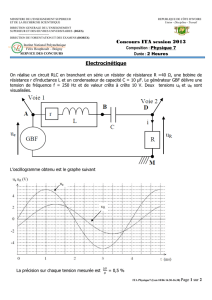
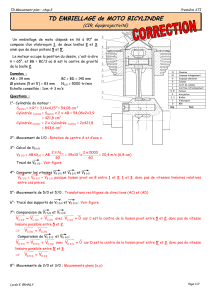
Document

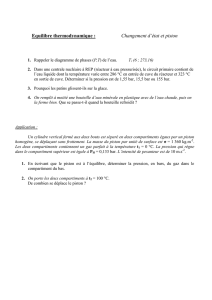
Facteurs de sélection de vannes proportionnelles
Copyright Eaton Hydraulics 2000
Steve Skinner, Eaton Hydraulics, Havant, UK

Facteurs de sélection de vannes proportionnelles
Configuration du piston
Débit nominal
Performances
Commande / Régulation
Réponse
Linéarité
Répétabilité
Reproductibilité
Hystérésis
Gain en pression
Recouvrement du piston

Configuration du piston
Configuration du piston
Débit nominal
Performances
Commande / Régulation
Réponse
Linéarité
Répétabilité
Reproductibilité
Hystérésis
Gain en pression
Recouvrement du piston

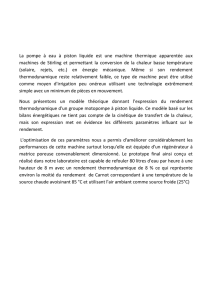
B
P T
A
20N
A B
T TP
Piston (symétrique) d'entrée et de sortie
Le piston représenté est le plus courant dans un
distributeur proportionnel. Pour une ouverture
donnée, la limitation du débit est la même sur toutes
les portées. Dans le cas d'un actionneur à surfaces
actives égales (tel qu'un moteur), ceci permet une
commande aussi bien sur l'entrée que sur la sortie.
Dans le cas d'un actionneur à surfaces actives
différentes (vérin), la commande porte essen-
tiellement, suivant le sens de déplacement, sur
l'entrée ou sur la sortie.

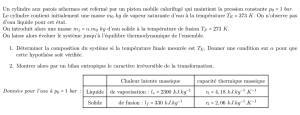
B
P T
A
28S
A B
T TP
Piston de sortie
Le piston de sortie n'a d'encoches qu'au
niveau des portées A-T et B-T. La limi-
tation du débit est relativement faible au
niveau des portées P-A et P-B (comme dans
un distributeur à commutation classique).
Le piston de sortie peut s'utiliser dans le
cas de vérins et de moteurs. Il s'utilise
souvent pour la commande de charges
négatives.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
1
/
62
100%