Le déplacement

Projet Robot Judoka
Muhamed MEHMEDINOVIC
Section informatique

Objectifs
Ensemble de classes modulaires permettant la gestion du
robot:
le déplacement:
Tourner
Avancer
Attaque
Défence
la localisation:
l’orientation:

Objectifs
Ensemble de classes modulaires permettant la gestion du robot:
le déplacement
tourner,
avancer,
attaquer,
se défendre,
la localisation,
l’orientation.

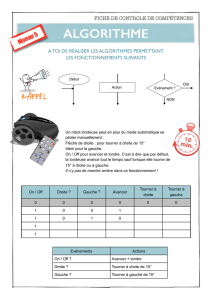
Le déplacement
Gestion des mouvements:
Smooth
Motion

Le déplacement: Smooth
Création d’une trajectoire:
lissée,
linéaire
Position
finale
Pentes
Position de
départ
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%