Exposé d`Olivier Sigaud

1/23
Olivier Sigaud, Vincent Padois, Camille Salaün
ISIR, UPMC-Paris 6
Prenom.Nom@isir.fr
(+33)1.44.27.88.53
Réunion GDR 22/10/2008
Apprentissage pour la
commande de robots redondants
éléments de l’état de l’art
Plan
Contrôle moteur humain
•Todorov
•Doya
•Shadmehr
Outils robotiques
•iLQG + LWPR
•OSC
•NAC

2/23
Rappel des objectifs
Mise au point de lois de commande pour les robots
redondants, poly-articulés, sur- et sous-actionnés
(humanoïdes)
Fondées sur des mécanismes d’adaptation du
comportement humain
Etude des travaux d’ingénieurs visant à rendre compte de
ces principes
Plan
Contrôle moteur humain
•Todorov
•Doya
•Shadmehr
Outils robotiques
•iLQG + LWPR
•OSC
•NAC

3/23
Trois composantes
du contrôle moteur
humain
Plan
Contrôle moteur humain
•Todorov
•Doya
•Shadmehr
Outils robotiques
•iLQG + LWPR
•OSC
•NAC

4/23
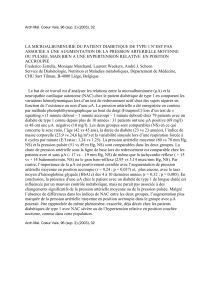
Vue de Todorov
Le contrôle moteur résout un problème d’optimisation: critère ?
Minimum jerk, minimum torque change
: n’explique rien…
Minimize error in f(motor noise)
=> minimiser entrée motrice
Minimal intervention principle => do not deal with useless dimensions
Harris&Wolpert 98 ; Todorov&Jordan 00
Controller Bio-mechanical system
State estimator Sensors
control
state
sensor feedback
estimated
state efferent
copy
noise (proportional to input)
noise
Plan
Contrôle moteur humain
•Todorov
•Doya
•Shadmehr
Outils robotiques
•iLQG + LWPR
•OSC
•NAC

5/23
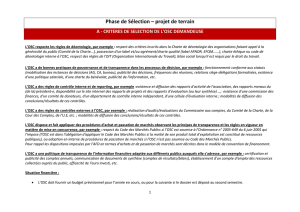
Vue de Doya
Doya (2000) Complementary roles of basal ganglia and cerebellum in learning and motor
control, Current Opinion in Neurobiology, 10:732-739
Apprentissage d’actions optimales et de modèles directs
Plan
Contrôle moteur humain
•Todorov
•Doya
•Shadmehr
Outils robotiques
•iLQG + LWPR
•OSC
•NAC
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%