Manuel PC - Orthesen

Manuel PC
Un concept d’appareillage
orthétique des membres
inférieurs en cas de
paralysie cérébrale
5e édition

2
Des médecins, des kinésithérapeutes et des orthoprothésistes n’ont cessé, au cours de ces
dernières années, de nous inciter à mettre au point une nouvelle articulation mécanique
de la cheville. Nous avons dû pour cela étudier les demandes les plus variées présentées
par diverses disciplines de différentes régions et nations. La Société Internationale pour
la Prothèse et l’Orthèse (ISPO) réclame elle aussi la possibilité d’apporter des réglages
aux orthèses tibio-pédieuses (AFO) [Mor, p. 258 et suivante]. Ces échanges ont conduit à
la conception de notre nouvelle articulation de cheville modulaire NEURO SWING. Outre
de nombreux autres domaines d’application, NEURO SWING peut être intégrée dans les
orthèses tibio- pédieuses (AFO) de patients atteints de paralysie cérébrale (patients PC).
Nos recherches relatives à la paralysie cérébrale ont révélé un énorme potentiel inuti-
lisé pour le traitement des patients PC, notamment pour l’emploi d’orthèses destinées à
accompagner les traitements mis en œuvre. Ainsi, les stratégies pratiquées actuellement
varient largement d’un pays à l’autre. Cette situation s’explique, d’une part, par le manque
d’harmonisation dans la classification de la marche pathologique liée à ces troubles et,
d’autre part, par l’absence d’une articulation orthétique qui remplisse toutes les condi-
tions requises. S’il reste impossible de classifier de façon unifiée les patients atteints de
paralysie cérébrale, il sera très difficile de fournir à l’équipe interdisciplinaire un concept
de thérapie adapté et l’appareillage orthétique correspondant. À l’heure actuelle, les
spécialistes optent pour un appareillage orthétique dont ils espèrent le plus d’avantages
tout en pouvant s’accommoder des inconvénients.
L’articulation de cheville modulaire NEURO SWING ouvrant de nouvelles perspectives pour
l’appareillage orthétique, il devient indispensable de repenser la plupart des concepts orthé-
tiques utilisés jusqu’ici pour les patients PC. Il nous sembla important, pour tenir compte
des différentes requêtes et pour élaborer un concept destiné à l’ensemble de l’équipe
interdisciplinaire, de soumettre des propositions adéquates d’appareillages orthétiques
basées sur une classification authentique et internationalement reconnue de la marche.
C’est ainsi que le
Manuel PC – Un concept d’appareillage orthétique des membres inférieurs
en cas de paralysie cérébrale vit le jour. Il s’adresse aux médecins, aux kinésithérapeutes,
aux orthoprothésistes, aux podo-orthésistes, aux biomécaniciens, mais aussi aux parents
concernés ou aux personnes s’occupant des patients, et bien sûr aux patients eux-mêmes.
Notre concept ne peut être compris que si l’on possède certaines connaissances de base
sur la physiologie de la marche. Le présent manuel explique les principaux termes tech-
niques et les différentes phases de la marche.
Nous avons réuni quelques résultats de nos recherches et diverses expériences afin de
répondre à l’intérêt manifesté par tous les spécialistes interrogés. Nous tenons à remer
-
cier ici toutes les personnes nous ayant apporté leur contribution.
Notre manuel PC ne prétend pas être parfait, son objectif est plutôt de lancer un concept
d’appareillage orthétique novateur pour les patients atteints de paralysie cérébrale. Mais
nous restons dépendants des suggestions nous permettant d’améliorer en permanence
la qualité de nos produits.
Votre équipe FIOR & GENTZ
Introduction

Introduction ............................................................................................................................... 2
Sommaire ................................................................................................................................... 3
L’objectif thérapeutique ......................................................................................................... 4
L’appareillage orthétique dans le traitement de la PC ................................................... 6
NEURO SWING intégrée dans une AFO dynamique ...................................................... 10
Classification des patients .................................................................................................. 12
Appareillage proposé pour marche du Type 1 ............................................................... 14
Appareillage proposé pour marche du Type 2 ............................................................... 16
Appareillage proposé pour marche du Type 3 ............................................................... 18
Appareillage proposé pour marche du Type 4 ............................................................... 20
Appareillage proposé pour marche du Type 5 ............................................................... 22
Marche pathologique du Type 1 ........................................................................................ 24
Marche pathologique du Type 2 ........................................................................................ 26
Marche pathologique du Type 3 ........................................................................................ 28
Marche pathologique du Type 4 ........................................................................................ 30
Marche pathologique du Type 5 ........................................................................................ 32
Glossaire ................................................................................................................................... 34
Bibliographie ........................................................................................................................... 40
3
Sommaire

4
L’objectif thérapeutique
Qu’est-ce que la paralysie cérébrale ?
En cas de paralysie cérébrale (PC), le cerveau envoie des impulsions erronées aux
muscles concernés ; ces derniers sont alors stimulés trop fortement, trop faiblement,
ou au mauvais moment. Il en résulte souvent des perturbations fonctionnelles de
certains groupes musculaires, avec généralement pour conséquence une marche
pathologique [Gag1, p. 65]. Par ailleurs, ces perturbations fonctionnelles peuvent
être accompagnées de spasticité [Pea, p. 89], laquelle modifie à son tour le tonus
musculaire qui peut soit dégrader, soit améliorer la marche.
Traitement de la paralysie cérébrale en équipe interdisciplinaire
Il est important que l’équipe interdisciplinaire, composée d’un médecin, d’un kiné-
sithérapeute, d’un ergothérapeute, d’un orthoprothésiste et d’un biomécanicien,
suive un concept thérapeutique commun pour lequel ils coopèrent tous étroitement
[Doe, p. 113 et suivantes].
12345 678910
123
123
123
Mid stance
456
456
456
789
789
789
Terme anglais
Initial contact Loading
response
Early
mid stance
Mid stance Late mid stance Terminal stance Pre swing Initial swing Mid swing Terminal swing
Terme français
Phase de
contact
Mise en charge Milieu de la
phase d’appui
(début)
Milieu de la
phase d’appui
Milieu de la
phase d’appui
(fin)
Lever du talon Phase
préoscillante
Début de la
phase oscillante
Milieu de la
phase oscillante
Fin de la phase
oscillante
Angle de la hanche
Flexion 20° Flexion 20° Flexion 10° Position neutre
(normale)
Extension 5° Extension 20° Hyper-
extension 10°
Flexion 15° Flexion 25° Flexion 20°
Angle du genou
Flexion 5° Flexion 15° Flexion 10° Flexion 5° Flexion 5° Flexion 5° Flexion 40° Flexion 60° Flexion 25° Flexion 0°
Angle de la cheville
Position neutre
(normale)
Flexion
plantaire 5°
Position neutre
(normale)
Extension
dorsale 5°
Extension
dorsale 5°
Extension
dorsale 10°
Flexion
plantaire 15°
Flexion
plantaire 5°
Position neutre
(normale)
Position neutre
(normale)

5
L’objectif thérapeutique
La première étape de ce concept thérapeutique devrait consister à commencer immé-
diatement une kinésithérapie [Kra, p. 188] chez un spécialiste de l’analyse de la marche,
l’objectif de ces soins étant de traiter les groupes musculaires déficitaires de sorte,
d’une part, que les impulsions motrices établissent les bonnes connexions cérébrales
[Hor, p. 5-26] et, d’autre part, de fortifier certains groupes musculaires par des exer-
cices de musculation ciblés. Ces deux mesures devraient favoriser un rapprochement
à la marche normale chez une personne valide.
Certains patients PC nécessitent, outre les soins kinésithérapiques, également des traite-
ments médicamenteux, par exemple avec des antispasmodiques comme la toxine botuli-
nique [Mol, p. 363] et des corrections chirurgicales de malformations orthopédiques [Gag2].
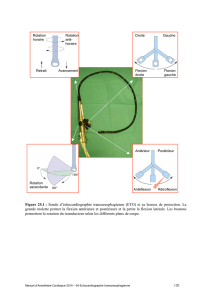
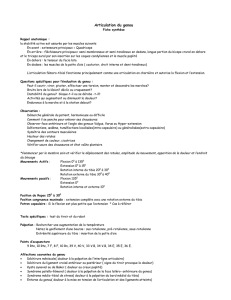
Le tableau ci-dessous illustre les différentes phases d’un cycle de marche normale,
prenant la jambe droite comme référence. Cette marche normale sert de modèle
à l’équipe interdisciplinaire et l’aide à atteindre l’objectif thérapeutique du patient
[Goe, p. 14, 44 et suivantes].
12345 678910
123
123
123
Mid stance
456
456
456
789
789
789
Terme anglais
Initial contact Loading
response
Early
mid stance
Mid stance Late mid stance Terminal stance Pre swing Initial swing Mid swing Terminal swing
Terme français
Phase de
contact
Mise en charge Milieu de la
phase d’appui
(début)
Milieu de la
phase d’appui
Milieu de la
phase d’appui
(fin)
Lever du talon Phase
préoscillante
Début de la
phase oscillante
Milieu de la
phase oscillante
Fin de la phase
oscillante
Angle de la hanche
Flexion 20° Flexion 20° Flexion 10° Position neutre
(normale)
Extension 5° Extension 20° Hyper-
extension 10°
Flexion 15° Flexion 25° Flexion 20°
Angle du genou
Flexion 5° Flexion 15° Flexion 10° Flexion 5° Flexion 5° Flexion 5° Flexion 40° Flexion 60° Flexion 25° Flexion 0°
Angle de la cheville
Position neutre
(normale)
Flexion
plantaire 5°
Position neutre
(normale)
Extension
dorsale 5°
Extension
dorsale 5°
Extension
dorsale 10°
Flexion
plantaire 15°
Flexion
plantaire 5°
Position neutre
(normale)
Position neutre
(normale)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%