DYNAMIQUE

DYNAMIQUE
Le sujet est composé de deux parties :
– la première partie est constituée de la partie étude mécanique du sujet CCP MP 1998 sur le système de
freinage par ABS ( à traiter en 1h15 maxi). La seconde partie du sujet (étude de la servo-valvle sera traitée
en TD).
– le sujet est complété par l’étude du contôle dynamique de trajectoire des véhicules, l’ESP. Seule la première
partie de ce sujet (origine BTS maintenance des véhicules automobile) est à traiter (1h15).
Exercice 1- ESP- Contrôle dynamique de stabilité des véhicules Corrigé page 10
Le dispositif ESP est destiné à répondre à toutes les situations critiques de conduite en supprimant les ten-
dances au dérapage dès les premiers signes de dérive (écart entre la trajectoire théorique souhaitée et la trajec-
toire réelle). Cette correction s’obtient en partie par des actions ciblées sur les freins. [Fig. 1 page 2)]. La procédure
de correction est décidée par le calculateur à partir des informations fournies par les capteurs suivants :
– Capteur vitesse roues.
– Capteur angle de braquage.
– Capteur d’accélération transversale.
La correction de trajectoire est contrôlée par le calculateur grâce aux informations fournies par le capteur
gyroscopique d’angle de lacet.
Cette étude vise à mettre en évidence les principes physiques mis en œuvre dans le dispositif ESP. Elle se
décompose comme suit :
1. Étude préalable.
2. Situation de comportement critique du véhicule.
3. Détermination de la dérive du véhicule.
4. Correction de trajectoire
A. Étude préalable. [Fig. 2]
Conditions d’étude :
– Le véhicule de type traction (roues AV motrices) décrit un arc de cercle, de rayon constant égal à r, sur une
route horizontale dans le plan (O,#»
x0,#»
y0).
– Le tangage (rotation du véhicule par rapport à l’axe (G,#»
x1)) sera considéré nul. Le roulis (rotation du véhicule
par rapport à l’axe (G,#»
y1)) sera considéré nul.
– Les résistances passives ainsi que l’inertie des éléments de transmission seront négligées.
1

2
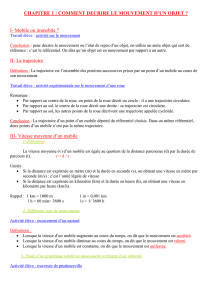
(a) cas du sur virage (b) cas du sous virage
Action du contrôle dynamique de stabilité : Le calculateur estime, à partir de la vitesse et de l’angle
volant, la trajectoire souhaitée par le conducteur. Il la compare à la trajectoire réelle évaluée à partir
des capteurs d’accélération transversale et d’angle de lacet (rotation autour de l’axe vertical Gz). Si le
véhicule présente un comportement de sous virage ou de survirage prononcé, le calculateur optimise
cette trajectoire en créant un moment de lacet MZ sur la voiture, par freinage d’une roue et/ou en
agissant sur le couple moteur. Cette action de correction n’est possible que dans les limites des lois de
la physique.
Figure 1: Action du contrôle dynamique de stabilité
La matrice d’inertie du véhicule (S) au point G exprimée dans R2est :
IG(S) = ⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
IGx00
0I
Gy0
00I
Gz
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠G
(#»
x2,#»
y2,#»
z2)
.
Paramétrage : [Fig. 2 page 3 ]
La position du centre d’inertie G du véhicule (S) est liée au repère (G,#»
x1,#»
y1,#»
z1). Le repère (G,#»
x2,#»
y2,#»
z2)est lié
au véhicule.

3
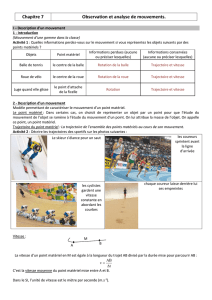
(a) Paramétrage
(b) repères
Le véhicule représenté en trait interrompu (lié au re-
père R1) représente le véhicule en trajectoire idéale. Le
véhicule en trait continu (lié au repère R2) représente
le véhicule en situation critique. La situation critique
est modélisée par l’angle de lacet β.
Figure 2: Paramétrage
On note : # »
ΩR1/R0=dα
dt ·#»
z0=˙
α·#»
z0=ω·#»
z0.
L’angle β(angle de lacet) caractérise la position du véhicule en situation critique (tableau 2).
βpositif Situation critique de sur-virage Perte d’adhérence du train AR
βnégatif Situation critique de sous-virage Perte d’adhérence du train AV
βnul Situation théorique idéale Pas de dérive
Table 2: Modélisation de la situation critique
A.1. Étude graphique

4
Q1. En fonctionnement normal, les quatre roues roulent sans glisser sur le sol (on pourra poser si nécessaire IA,
IB,I
Cet IDles points de contact entre le sol et chaque roue).
Q1a. Tracer en A, C et D, la direction de # »
VA∈V/S,# »
VC∈V/Set # »
VD∈V/S.
Q1b. en déduire la position de Centre Instantanée de Rotation (C.I.R) O
Q1c. en déduire la direction de # »
VB∈V/Set # »
VG∈V/S, dessiner la roue en B.
Q1d. On représente la norme de # »
VG∈V/Spar une dimension de 3cm, tracer toutes les vitesses.
A.2. Étude analytique
Q2. Déterminer # »
VG∈S/R0vitesse du point G appartenant au véhicule par rapport à R0exprimée dans la base
(#»
x1,#»
y1,#»
z1)
Q3. Déterminer # »
Γ
G∈S/R0accélération du point G appartenant au véhicule par rapport à R0exprimée dans la base
(#»
x1,#»
y1,#»
z1)en fonction de r,˙
αet ¨
α.
On pose dans le repère R1:# »
Γ
G∈S/R0=γx1·#»
x1+γy1·#»
y1avec γx1·#»
x1=accélération transversale et γy1·#»
y1=
accélération longitudinale (par référence à la trajectoire idéale).
Q4. Donner l’expression littérale de γx1en fonction de ret de ˙
αpuis de vet de r(v= mesure algébrique du
vecteur # »
VG∈S/R0et r= rayon de la trajectoire circulaire).
Q5. Exprimer # »
ΩS/R0dans la base (#»
x1,#»
y1,#»
z1)en fonction de ˙
αet de ˙
β.
Q6. Montrer que le moment dynamique en G du véhicule (S), dans son mouvement par rapport à R0, a pour
expression : # »
δG,S/R0=I
Gz·¨
α+¨
β·#»
z1. Écrire dans la base (#»
x1,#»
y1,#»
z1), le torseur dynamique au point G du véhicule
de masse m, dans son mouvement par rapport à R0.
B. Situation de comportement critique du véhicule.
Conditions d’étude : (on suppose d’abord le véhicule en situation théorique idéale)
On considère que le véhicule de masse mse déplace à vitesse constante (couple moteur négligé) selon la
trajectoire circulaire théorique. (dans ce cas β=0, ˙
β=0,¨
β= 0, les repères R1et R2sont alors confondus et
v=cte ⇒ω=˙
α=cte ⇒# »
γy1=#»
0).
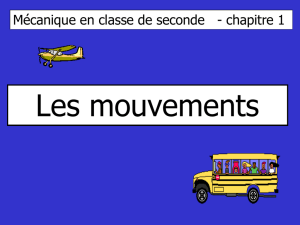
Les dimensions du véhicule ainsi que la modélisation des actions sol/roue (cas général) sont données sur les
documents techniques [figure 3 page 4 et figure 4 page 5].
(a) Schéma
–m= 1600kg
–L=2,95m
–a=1,25m
–b=1,70m
–e=0,81m
–h=0,47m
–I
Gz= 1780kgm2
sur le schéma, R2=R
1.
(b) données
Figure 3: Caractéristiques du véhicule
On donne
– les torseurs d’actions du sol sur les roues en A, B, C, D exprimés dans la base (#»
x1,#»
y1,#»
z1):
Asol→roue=⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
TAx0
00
NA0
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭A
B1
,Bsol→roue=⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
TBx0
00
NB0
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭B
B1
,

5
Csol→roue=⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
TCx0
00
NC0
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭C
B1
,Dsol→roue=⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
TDx0
00
ND0
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭D
B1
;
– le torseur dynamique du véhicule exprimé dans la base (#»
x1,#»
y1,#»
z1)::DS/R0=⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
m·γx10
00
00
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭G
B1
.
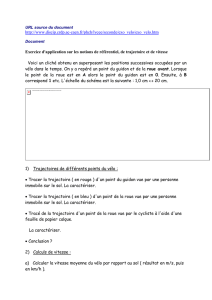
(a) Schéma du contact sol roue
La décomposition de toutes les actions sol/roue
se fera dans le repère R1(angle de braquage des
roues avant négligé) Ainsi pour la roue en A, on
note :
# »
Asol→roue =T
Ax·#»
x1+T
Ay·#»
y1+N
A·#»
z1
avec
–T
Ax: composante tangentielle transversale
–T
Ay: composante tangentielle longitudinale
–N
A: composante normale
On donne :
Dans le cas d’un virage à gauche par rapport au
repère R1(cas étudié) :
μtransversal =−TAx
NA
dans le cas des roues motrices (véhicule en accélé-
ration) :
μlongitudinal =TAy
NA
Hypothèse :
μtransversal =μlongitudinal =μMAXIsol/roues
=μmax
En effet le système ESP maintient les pneuma-
tiques dans une plage de % de glissement faible
où cette hypothèse est valable.
Condition d’adhérence :
TA≤μmaxNAavec # »
TA=# »
TAx+# »
TAy
et μmax =0,8
(b) données et hypothèses
Figure 4: Modélisation du contact sol-roue
Q7. Isoler le véhicule, faire l’inventaire des actions extérieures, appliquer le principe fondamental de la dyna-
mique en G et en déduire les 6 équations.
Condition d’adhérence transversale. On rappelle que :
μtransersal =μt=−TAx
NA=−TBx
NB=−TCx
NC=−TDx
ND.
Q8. A partir des équations de la résultante dynamique n et de l’équation supplémentaire ci-dessus ; donner
l’expression de μten fonction de γx1et de g.
Q9. Vitesse maximale admissible. Lorsque μtransMAXI =0,8, calculer la vitesse maximale admissible dans ces
conditions sans que le véhicule se trouve en situation critique de dérapage. On rappelle que γx1=−v2
ravec
 6
7
8
9
6
7
8
9
1
/
9
100%