1cinétique des systèmes matériels nouveau

Cinétique des systèmes matériels (méca 1) 1
La cinématique concerne les positions, vitesses et accélérations de systèmes matériels.
cinématique : géométrie + temps (purement mathématique)
La cinétique se construit à partir de la cinématique en rajoutant la notion de masse ; son objet est l’étude des mouvements
de systèmes matériels, indépendamment des causes qui les produisent.
cinétique : cinématique + masse
La dynamique, elle, a pour objet l’étude des mouvements en liaison avec leurs causes.
dynamique : cinétique + forces (cas particulier ou référentiel particulier : statique)
I. Rappels
1. Référentiel
Position, mouvement, vitesse, accélération étant des notions relatives, quand on étudie un système matériel, on doit
préciser « par rapport à quoi » se fait l’étude : on doit préciser « la référence » . Tout solide indéformable peut servir de
référence : tout solide indéformable peut constituer le référentiel d’étude.
référentiel =solide
Un référentiel est décrit mathématiquement par 1 point et 3 droites fixes du solide se coupant en ce point, le tout
constituant un repère cartésien du référentiel. Il existe une infinité de repères cartésiens associés à un solide donné. Par
abus de langage, on identifie souvent les notions de référentiel et de repère cartésien.
référentiel ={repères cartésiens associés à un solide, de type Oxyz}
Une fois le référentiel d’étude précisé (noté ℜ), et un repère cartésien associé choisi, on peut définir, pour le point matériel
M étudié :
par rapport au référentiel ℜ
ℜℜ
ℜ
sa position à chaque instant. On la caractérise indifféremment :
par trois réels appelés coordonnées de M. Selon les besoins, on peut utiliser :
♦ les coordonnées cartésiennes (x,y,z) (projections sur Ox, sur Oy, sur Oz)
♦ les coordonnées cylindriques (ρ,θ,z)
♦ les coordonnées sphériques (r,θ,ϕ)
par son vecteur position
r
r
=
OM
. Ce vecteur peut se décomposer sur différentes bases de projection :
♦ sur la base cartésienne (
x
u
r
,
y
u
r
,
z
u
r
) :
r
r
=x
x
u
r
+ y
y
u
r
+ z
z
u
r
. Les composantes de
r
r
se confondent alors
(et dans ce cas seulement) avec les coordonnées cartésiennes.
♦ sur la base locale cylindriques )u,u,u(
z
r
r
r
θρ
:
r
r
= ρ
ρ
u
r
+ z
z
u
r
♦ sur la base locale sphérique )u,u,u(
rϕθ
r
r
r
r
r
=r
r
u
r
CINÉTIQUE DES SYSTÈMES MATÉRIELS

Cinétique des systèmes matériels (méca 1) 2
sa trajectoire, ensemble des positions occupées par le point matériel M au cours du temps. Quand on connaît la
trajectoire, on peut définir une quatrième façon de repérer la position du point à l’instant t : s=
∩
AM
mesure de l’arc
algébrique (origine A, trajectoire orientée).
sa vitesse. Elle définie par
ℜ
ℜ
=
/
/
dt
OMd
)M(v
r
. Ce vecteur vitesse de M par rapport à ℜ
ℜℜ
ℜ peut se décomposer sur
les 3 bases définies ci-dessus (on peut faire 3 décompositions d’un vecteur unique
v
r
(M)
/ℜ
) :
♦ sur la base cartésienne :
zyx/
uzuyux)M(v
r
&
r
&
r
&
r
++=
ℜ
♦ sur la base locale cylindrique :
z/
uzuu)M(v
r
&
r
&
r
&
r
+θρ+ρ=
θρℜ
♦ sur la base locale sphérique (connaissance des composantes non exigée)
♦ on peut également écrire, puisque la vitesse d’un point matériel est tangente à sa
trajectoire :
τ=τ=
ℜ
r
&
r
r
sv)M(v
/
où
v
est la vitesse algébrique sur la trajectoire et
τ
r
est un vecteur unitaire
local, tangent à la trajectoire au point M occupé par le point matériel à l’instant considéré.
son accélération définie par
ℜ
ℜ
=
/
2
2
/
dt
OMd
)M(a
r
. Ce vecteur accélération de M par rapport à ℜ
ℜℜ
ℜ peut se
décomposer sur les 3 bases définies ci-dessus (on peut faire 3 décompositions d’un vecteur unique
a
r
(M)
/ℜ
) :
♦ sur la base cartésienne :
zyx/
uzuyux)M(a
r
&&
r
&&
r
&&
r
++=
ℜ
♦ sur la base locale cylindrique :
z
2
/
uzu)2(u)()M(a
r
&&
r
&&&
&
r
&
&&
r
+θρ+θρ+θρ−ρ=
θρℜ
♦ sur la base locale sphérique (cette décomposition n’est pas à connaître).
♦ sur le trièdre de Fresnet (base locale également) (
)b,n,
r
r
r
τ
: hors programme.
2. Changement de référentiel
Connaissant le mouvement du point matériel M par rapport au référentiel ℜ, on peut décrire le mouvement du point M par
rapport à un autre référentiel ℜ’ à condition de connaître le mouvement de ℜ’ par rapport à ℜ.
On va décrire deux mouvements relatifs particuliers (les seuls au programme) et rappeler les formules de composition
des vitesses et des accélérations.
a) Mouvements relatifs particuliers de deux référentiels
α)
ℜ
’ est en translation par rapport à
ℜ
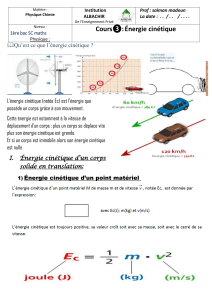
Soit (Oxyz) un repère cartésien de ℜ, O’x’y’z’ un repère cartésien de ℜ’.
ℜ’ est en translation par rapport à ℜ si et seulement si toute droite liée à ℜ’ reste parallèle à elle-même au cours du temps.
Conséquences : tous les points liés à ℜ’ ont même vecteur vitesse dans ℜ (à un instant t quelconque). (cf sup pour démo)
z’
y’
y
x x’
O
z’
y’
x’
z’
y’
x’
z’
y’
x’
z
O’ O’ O’
O’

Cinétique des systèmes matériels (méca 1) 3
Si ℜ’ est en translation par rapport à ℜ, pour tout point M’ lié à ℜ’ :
ℜℜ
=ℜ∈
//
)'O(v)''M(v
r
r
Il s’agit bien de vecteurs vitesse (de points de ℜ’) par rapport à ℜ
ℜℜ
ℜ. (La vitesse par rapport à ℜ’ d’un point lié à ℜ’ est
nulle!).
Les trajectoires de tous les points liés à ℜ’ sont superposables. On parle de :
translation rectiligne si ces trajectoires sont des droites (forcément parallèles) .
translation elliptique si les trajectoires sont des ellipses.
translation circulaire si ces trajectoires sont des cercles.
Remarque : le mot translation caractérise le mouvement d’un référentiel (d’un solide) par rapport à un autre. Il ne peut en
aucun cas s’employer pour le mouvement d’un point.
β)
ℜ
’ est en rotation autour d’un axe fixe de
ℜ
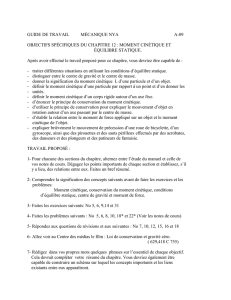
Prenons cet axe fixe de ℜ comme axe Oz. Les points de
cette droite sont fixes aussi dans ℜ’ : prenons cet axe
comme axe O’z’ et O’ confondu avec O.
Posons θ=(Ox,Ox’) (orienté par le sens positif associé à
Oz).
On appelle vitesse angulaire instantanée de rotation de ℜ’
par rapport à ℜ, la grandeur algébrique :
dt
dθ
=ω
et vecteur rotation instantané de ℜ’ par rapport à ℜ, le vecteur
zz/'
u
dt
d
urr
rθ
=ω=ω
ℜℜ
La vitesse par rapport à ℜ d’un point M’ lié à ℜ’ s’écrit alors :
Si ℜ’ est en rotation autour d’un axe fixe de ℜ, pour tout point M’ lié à ℜ’ :
'HM'OM)''M(v
/
∧ω=∧ω=ℜ∈
ℜ
r
r
r
où H est le projeté orthogonal de M’ sur l’axe
b) Point coïncidant
Soit M un point matériel (dont on veut étudier le mouvement soit par rapport à ℜ, soit par rapport à ℜ’).
On appelle point coïncidant de M dans ℜ’ à l’instant t, M
cℜ’
, le point « abstrait » de même position que M à l’instant t,
mais de vitesse nulle dans ℜ’ à l’instant t :
=
≡
ℜℜ
ℜ
ℜ
0)M(vvitesse
MMposition
M
'/'c
'c
'c
r
r
c) Composition des vitesses
On montre que la vitesse de M par rapport au référentiel ℜ est la somme de sa vitesse par rapport au référentiel ℜ’ et de ce
qu’on appelle sa vitesse d’entraînement (par ℜ’); cette vitesse d’entraînement est par définition la vitesse du point
coïncidant de M dans ℜ’ à l’instant t, M
cℜ’
.
Oz≡O’z’
y’
y
x x’
O≡O’
θ

Cinétique des systèmes matériels (méca 1) 4
)M(v)M(v)M(v
e'//
r
r
r
+=
ℜℜ
avec
ℜℜ
=
/'ce
)M(v)M(v
r
r
α) Cas particulier où
ℜ
’ est en translation par rapport à
ℜ
Tous les points liés à ℜ’ ont alors même vitesse. La vitesse d’entraînement, i.e. la vitesse du point coïncidant du point
matériel, est égale à la vitesse du point O’ origine du repère cartésien associé à ℜ’. (La vitesse d’entraînement d’un point
matériel M est indépendante de sa position).
La loi de composition des vitesses s’écrit donc dans ce cas particulier :
Cas où ℜ’ est en translation par rapport à ℜ
ℜℜℜ
+=
/'//
)'O(v)M(v)M(v
r
r
r
β)
ℜ
’ est en rotation autour d’un axe fixe de
ℜ
D’après la définition même de ce mouvement relatif de ℜ’ par rapport à ℜ, le point coïncidant décrit une trajectoire
circulaire de centre H, projeté de M sur l’axe de rotation à l’instant t.
La vitesse d’entraînement est :
HMv
/'e
∧ω=
ℜℜ
r
r
La loi de composition des vitesses s’écrit :
Cas où ℜ’ est en rotation autour d’un axe fixe de ℜ
HM)M(v)M(v
/''//
∧ω+=
ℜℜℜℜ
r
r
r
d) Composition des accélérations
On montre que la loi de composition des accélérations s’écrit :
∧ω=
=
+
+
=
ℜℜℜ
ℜℜ
ℜℜ
Coriolis" de"ou airecomplémenton accélérati )M(v2)M(a
ntentraînemed'on accélérati)M(a)M(a
avec
)M(a)M(a)M(a)M(a
'//'c
/'ce
ce'//
r
rr
rr
r
r
r
r
α) Cas particulier où ℜ’ est en translation par rapport à ℜ
Le vecteur vitesse instantanée de rotation de ℜ’ par rapport à ℜ est alors nul, l’accélération de Coriolis est donc nulle.
Par ailleurs, tous les points liés à ℜ’ ont même accélération. L’accélération d’entraînement, i.e. l’accélération du point
coïncidant du point matériel, est donc égale à l’accélération du point O’ origine du repère cartésien associé à ℜ’.
(L’accélération d’entraînement d’un point matériel M est indépendante de sa position).
0)M(a;)'O(a)M(a
c/e
r
r
r
r
==
ℜ
La loi de composition des accélérations s’écrit :
Cas où ℜ’ est en translation par rapport à ℜ
ℜℜℜ
+=
/'//
)'O(a)M(a)M(a
r
r
r
β) ℜ’ est en rotation autour d’un axe fixe de ℜ
Le point coïncidant décrit une trajectoire circulaire de centre H, projeté de M sur l’axe de rotation à l’instant t.
L’accélération d’entraînement s’écrit (attention : ce n’est pas la dérivée de la vitesse d’entraînement) :
HMuHMuua
z
22
e
∧θ+ω−=θρ+θρ−=
θρ
r
&&
r
&&
r
&
r
:
HM
dt
d
HMa
2
e
∧
ω
+ω−=
r
r
cas courant d’un mouvement d’entraînement uniforme (
ω==θ cst
&
):
HMa
2
e
ω−=
r

Cinétique des systèmes matériels (méca 1) 5
II. Éléments cinétiques
Soit ℜ le référentiel d’étude, dans lequel en l’absence de précision, toutes les grandeurs seront définies.
Le système étudié est soit
• Un ensemble discret de n points matériels M
i
, de masse m
i
. On le notera S
d
. Soit
r
r
i
le vecteur position de M
i
à
l’instant t,
r
v
i
son vecteur vitesse,
a
r
i
son vecteur accélération.
• Une distribution continue de matière que l’on peut décomposer en portions élémentaires assimilables à des points
matériels M, de masse dm(M). On le notera S
c
. Soit
r
r
(M), le vecteur position d’une telle portion élémentaire,
v
r
(M)
son vecteur vitesse,
a
r
(M) son vecteur accélération.
1. Centre de masse (centre d’inertie, barycentre)
Soit O un point quelconque. Le centre de masse G du système est défini par :
∑
∑
=
=
=
n
1i i
n
1i ii
m
OMm
OG
pour un ensemble discret de points matériels S
d
∫
∫
∈
∈
=
SM
SM
)M(dm
)M(dmOM
OG
pour une distribution continue de matière S
c
Notons m la masse totale du système {M
i
}, c’est la somme des masses des points matériels qui le constituent :
m mi
i
n
==
∑
1
pour un ensemble discret de points matériels
∫
∈
λλ= σσ= ρρ=
=
SM
)M(dl)M(dm
)M(dS)M(
)M(dV)M(dm
)M(dmm
(M)) linéique (masse linéique ondistributi une pour (M)) surfacique (masse surfacique ondistributi une pourdm (M)) volumique (masse volumique ondistributi une pour
avec
Remarques :
• D’après sa définition, G vérifie aussi :
i
n
1i ii
n
1i ii
n
1i i
GMmOGm)GMOG(mOMmOGm
∑∑∑
===
+=+==
soit :
0GMm
i
n
1i i
r
=
∑
=
ou
0)M(dmGM
SM
r
=
∫
∈
pour une distribution continue de matière.
ceci peut constituer la définition du CDM. Elle a l’avantage d’être intrinsèque (ne fait pas intervenir de point O).
• Le centre d’inertie possède la propriété d’associativité : le centre d’inertie d’un système constitué de plusieurs sous-
systèmes est le barycentre des centres d’inertie de chacun des sous-systèmes affectés des masses de chacun.
• Lorsqu’un système est homogène et présente un élément de symétrie, le centre d’inertie se trouve sur cet élément.
Exemple : Soit Oz un axe de symétrie de la distribution. On groupe les points matériels par couples de même masse
(M
i
,M
i
’), avec M
i
’ symétrique de M
i
par rapport à Oz. Le vecteur
'OMmOMm
iiii
+
est selon Oz. En ajoutant les
contributions de tous les points matériels, on déduit que le vecteur m
OG
est selon Oz : G est sur l’axe Oz.
 6
7
8
6
7
8
1
/
8
100%