MECANIQUE QUANTIQUE Premi`ere partie : Notions de base

UNIVERSITE LIBRE DE BRUXELLES
Facult´e des Sciences Appliqu´ees
MECANIQUE QUANTIQUE
Premi`ere partie : Notions de base
D. Baye
2012

Chapitre 1
Particule dans un potentiel central
1.1 Introduction
1.1.1 Equation de Schr¨odinger
Dans ce chapitre, nous allons revoir et approfondir un probl`eme important de la
m´ecanique quantique ´etudi´e au chapitre 6 de PQS. Consid´erons une particule de masse
mplong´ee dans un puits de potentiel V(r) `a sym´etrie sph´erique. Ce type de potentiel
est appel´e un potentiel central. Il ne d´epend que de la norme r=||r|| de la coordonn´ee
rqui caract´erise la position de la particule.
Nous nous limitons ici `a l’´etude des solutions stationnaires du probl`eme, fournies
par l’´equation de Schr¨odinger ind´ependante du temps
Hψ =Eψ, (1.1)
o`u Eet ψsont respectivement l’´energie et la fonction d’onde de la particule. L’op´erateur
hamiltonien se d´ecompose comme en m´ecanique classique en
H=T+V, (1.2)
o`u Vest ici un potentiel central. L’op´erateur d’´energie cin´etique Ts’´ecrit aussi comme
en m´ecanique classique sous la forme
T=p2
2m,(1.3)
o`u pest l’impulsion de la particule. Cependant, en m´ecanique quantique, l’impulsion
est un op´erateur diff´erentiel
p=−i¯h∇,(1.4)
o`u ¯hest la constante de Planck 1.
Les ´equations (1.1) `a (1.4) permettent de r´e´ecrire l’´equation de Schr¨odinger sous la
forme −¯h2
2m∆ + V(r)ψ(r) = Eψ(r).(1.5)
1. En fait, c’est h= 2π¯hqui est la constante introduite par Planck mais, comme nous n’utiliserons
que ¯h, nous pouvons l’appeler constante de Planck sans risque d’ambigu¨ıt´e.
1

Nous nous int´eressons aux solutions de cette ´equation qui v´erifient certaines conditions
impos´ees par les postulats de la m´ecanique quantique. D’un point de vue math´ema-
tique, nous pouvons d´ej`a remarquer que les fonctions d’onde ψdoivent ˆetre telles que
∆ψexiste en tout point de l’espace.
1.1.2 Choix d’un syst`eme d’unit´es
Avant de tenter de r´esoudre l’´equation de Schr¨odinger (1.5), nous allons simplifier
son ´ecriture en choisissant un syst`eme d’unit´es appropri´ees au probl`eme ´etudi´e. Nous
avons le droit de choisir quatre unit´es principales : trois unit´es ind´ependantes de type
m´ecanique et une de type ´electrique. Rien ne nous oblige `a choisir les unit´es principales
traditionnelles, longueur, masse, temps et intensit´e de courant. Nous choisissons au
contraire les unit´es en fonction du probl`eme ´etudi´e.
La premi`ere unit´e que nous choisissons est la constante de Planck ¯h. Cette unit´e a les
dimensions d’une “action” qui correspond au produit d’une ´energie par un temps. Les
moments cin´etiques par exemple ont les mˆemes dimensions qu’une action [´eq. (1.13)].
Nous ´ecrivons ce choix sous la forme
¯h= 1.(1.6)
L’´equation (1.6) exprime que la grandeur physique ¯hprend la valeur 1 dans le syst`eme
d’unit´es choisi. L’unit´e d’action est donc la valeur de ¯h, c’est-`a-dire 1.055 ×10−34 J s
dans un syst`eme d’unit´es plus familier.
Une deuxi`eme unit´e fondamentale que nous d´efinissons est l’unit´e de masse. On
utilise souvent la masse mde la particule comme unit´e. Ici, `a titre d’exemple, nous
choisissons
2m= 1.(1.7)
L’´equation (1.7) exprime que l’unit´e de masse est le double de la masse de la particule.
La masse de la particule est donc 1/2, c’est-`a-dire une demi unit´e de masse.
La derni`ere unit´e m´ecanique est souvent choisie en fonction du potentiel V. Comme
nous ne souhaitons pas pr´eciser ce potentiel, nous allons supposer qu’il s’agit d’une
longueur acaract´eristique de ce potentiel. Nous ´ecrivons donc
a= 1.(1.8)
Si le probl`eme comporte des aspects ´electromagn´etiques, nous pouvons d´efinir une
quatri`eme unit´e. On choisit souvent la charge edu proton (ou la valeur absolue de la
charge de l’´electron),
e= 1.(1.9)
Remarquons que (1.6) et (1.9) sont des unit´es universelles. Elles correspondent `a des
constantes physiques fondamentales de la nature. Les unit´es (1.7) et (1.8) sont parti-
culi`eres au probl`eme ´etudi´e. Il est possible de choisir un syst`eme d’unit´es ne comportant
que des constantes physiques fondamentales.
Apr`es le choix des quatre unit´es principales, toutes les autres unit´es sont fix´ees. Il
est utile d’en d´eduire l’expression de quelques unit´es d´eriv´ees
2

´energie : ¯h2/2ma2,
temps : 2ma2/¯h,
vitesse : ¯h/2ma,
impulsion : ¯h/a.
On v´erifie facilement que ces diverses grandeurs ont bien les dimensions annonc´ees
et qu’elles valent 1 dans le syst`eme d’unit´es choisi. Cette derni`ere propri´et´e permet
d’affirmer que nous avons bien les unit´es des diff´erentes grandeurs mentionn´ees.
Dans le syst`eme d’unit´es (1.6) `a (1.8), l’´equation de Schr¨odinger (1.5) s’´ecrit
[−∆ + V(r)]ψ(r) = Eψ(r).(1.10)
Bien entendu, la coordonn´ee rest `a pr´esent exprim´ee en unit´es a.
1.2 Equation de Schr¨odinger en coordonn´ees sph´e-
riques
1.2.1 Op´erateurs r,pet Len coordonn´ees sph´eriques
Remarquons d’abord que rjoue deux rˆoles diff´erents dans l’´equation de Schr¨odinger
(1.10). Dans la fonction d’onde ψ(r), rest un vecteur traditionnel repr´esentant une
position possible de la particule. Dans le potentiel V(r) (ou V(r)), c’est un op´erateur
multiplicatif. Nous reviendrons plus longuement sur ces deux aspects de ret sur la
relation qui existe entre eux au chapitre 2.
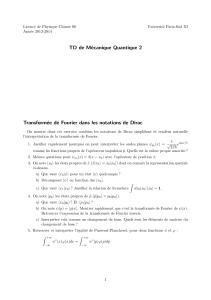
O
θr
r
ϕ
y
x
z
Figure 1.1 – Coordonn´ees sph´eriques.
Soient r1,r2,r3les composantes cart´esiennes de r(que nous ´ecrirons le plus souvent
x, y, z). Comme le potentiel poss`ede la sym´etrie sph´erique, le syst`eme de coordonn´ees
cart´esiennes ne permet pas de r´esoudre l’´equation de Schr¨odinger par la m´ethode de
s´eparation des variables. Nous allons donc utiliser un syst`eme de coordonn´ees en rela-
tion avec la sym´etrie du potentiel (voir la figure 1.1). Pour d´ecrire le vecteur r, nous
3

utilisons les coordonn´ees r,θ,ϕ. La coordonn´ee radiale rest la norme de r. La colati-
tude θest l’angle entre un axe de r´ef´erence zet la direction de r(0 ≤θ≤π). L’angle
azimutal ϕest l’angle entre le plan contenant les axes xet zet le plan contenant ret
l’axe z(0 ≤ϕ < 2π). Nous noterons souvent le couple (θ, ϕ) de fa¸con compacte avec
la notation Ω.
Dans un syst`eme d’unit´es o`u ¯h= 1, l’impulsion (1.11) s’´ecrit
p=−i∇.(1.11)
En coordonn´ees cart´esiennes, les composantes p1,p2,p3de psont px=−i∂/∂x,py=
−i∂/∂y, et pz=−i∂/∂z. Avec les composantes de r, ces composantes v´erifient les
relations de commutation canoniques
[rj, pk] = iδjk,(1.12)
o`u [A, B] = AB −BA est le commutateur de Aet B. Lorsque leurs indices diff`erent, les
composantes rjet pkcommutent. Par contre, rjet pjne commutent pas. Leur commu-
tateur prend la valeur particuli`ere i. Ce sont des op´erateurs conjugu´es canoniquement.
Comme en m´ecanique classique, les op´erateurs ret ppermettent de d´efinir l’op´era-
teur de moment cin´etique orbital
L=r×p.(1.13)
Les composantes de cet op´erateur poss`edent des propri´et´es de commutation remar-
quables sur lesquelles nous reviendrons au chapitre 6. Nous allons ici nous int´eresser `a
la relation qui existe entre p2et L2.
1.2.2 Impulsion radiale
Consid´erons la grandeur classique appel´ee impulsion radiale, r−1
cl rcl ·pcl. C’est la
composante de l’impulsion classique pcl suivant la direction de la coordonn´ee classique
rcl. Par la r`egle de correspondance (§3.3), on peut d´efinir l’op´erateur d’impulsion radiale
pr=1
21
rr·p+p·r1
r.(1.14)
qui correspond `a l’expression classique sym´etris´ee. Nous verrons au chapitre 2 que
l’op´erateur prest bien hermitique mais qu’il n’est pas une observable (§2.4.3). L’impul-
sion radiale n’est donc pas une grandeur mesurable (§3.2.4) !
En coordonn´ees sph´eriques, cet op´erateur prend la forme plus simple (annexe 1A)
pr=−i1
r
∂
∂r r. (1.15)
Il est conjugu´e canoniquement `a la coordonn´ee radiale r,
[r, pr] = i. (1.16)
En effet, si fest une fonction d´erivable quelconque, on a
[r, pr]f=−i∂
∂r (rf) + i1
r
∂
∂r (r2f) = if.
4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
1
/
259
100%