Dynamique et lois de conservation

Physique - 6 ème année - Ecole Européenne
Ecole Européenne de Francfort Page 25
Chapitre n° 2 : DYNAMIQUE ET LOIS DE CONSERVATION
La dynamique (classique) étudie les relations qui existent entre les causes qui ont provoqué le
mouvement (les forces) et la nature du mouvement (rectiligne uniforme, rectiligne uniformément
varié, à accélération constante …).
Dans cette leçon, nous allons montrer, d'autre part, que parmi les grandeurs physiques attachées
à un système, certaines prennent une importance particulière car elles se conservent au cours de
l'évolution du système.
I) Les principes de la mécanique
1)
:
Première loi de Newton : principe d'inertie
a) Définitions :
:
Un système est dit isolé lorsqu'aucune force extérieure ne lui est appliquée.
Un système est dit pseudo-isolé lorsque la somme vectorielle des forces extérieures qui
lui sont appliquées est nulle : Σ
→
F
=
0
→
Remarque : En toute rigueur, il n'existe pas de système isolé puisque,
en particulière, les forces de gravitation ont une portée
infinie.
Remarque : Un objet parallélépipédique immobile sur un plan incliné
est en équilibre sous l'action de deux forces : sont poids et
la réaction du plan (le contact entre l'objet et le plan a lieu
avec frottements). On peut considérer l'objet comme étant
pseudo-isolé.
Remarque : Un mobile autoporteur en fonctionnement,
immobile sur la table à coussin d'air horizontale
est en équilibre sous l'action de deux forces :
son poids et la réaction de la table (le contact, entre le mobile et la table, a
lieu sans frottement grâce au coussin d'air).
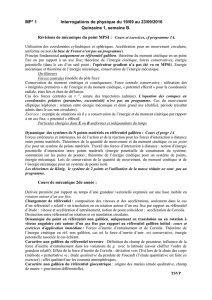
b) Expérience :
On étudie le mouvement d'un mobile autoporteur
sur la table à coussin d'air horizontale.
L'intérêt de la table à coussin d'air est que le mobile
reste pseudo-isolé même s'il est en mouvement (à
condition que la table soit horizontale).
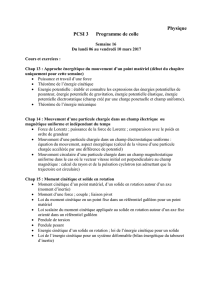
L'expérience montre que les positions successives occupées par le point G
(projection sur le plan de la table du centre d'inertie G0), et enregistrées à
intervalles de temps réguliers, sont alignée est équidistantes :
Le mouvement du centre d'inertie G0 du mobile autoporteur sur la table à air horizontale
(solide pseudo-isolé) est rectiligne et uniforme.
c) Enoncé :
Le centre d'inertie d'un système isolé ou pseudo-isolé est animé d'un mouvement
rectiligne et uniforme ou demeure immobile, dans à un référentiel galiléen :
Σ
→
F
=
0
→
⇒
v
C
→
=
c
te
→

Dynamique et lois de conservation
Page 26 Christian BOUVIER
d) Référentiel galiléen :
En dynamique on postule l'existence de référentiels particuliers, les référentiels galiléens
(première loi de la mécanique).
Un référentiel est considéré comme galiléen si, le principe d'inertie y est vérifié.
Deux référentiels galiléens sont en mouvement de translation rectiligne et uniforme l'un
par rapport à l'autre.
Quelques référentiels galiléens utilisés en Physique :
- référentiel universel
-
, centré sur la Galaxie et dont les axes visent trois galaxies très
éloignées. C'est le référentiel le plus galiléen. Utilisé parfois en astrophysique.
référentiel héliocentrique
-
, centré sur le Soleil et dont les axes visent trois étoiles très
éloignées. Il est utilisé pour l'étude du mouvement des planètes des astéroïdes ou des
sondes interplanétaires. On peut déterminer l'écart à la "galiléennité" du référentiel
héliocentrique par rapport au référentiel universel car le Soleil tourne autour du centre de
la Galaxie : vS = 500 km.s−1; RG = 50000 a-l; a = 5,3.10−10 m.s−2.
référentiel géocentrique
-
, dont l'origine est le centre de la Terre et dont les axes visent
trois étoiles très éloignées. Il est utilisé pour l'étude du mouvement des satellites
terrestre, station orbitale ou navettes spatiales. Il est en translation circulaire par rapport
au référentiel héliocentrique : vtranslation = 30 km.s−1; DS-T = 1,5.1011 m; a = 6,0.10−3 m.s−2.
référentiel du laboratoire
(ou référentiel terrestre) peut être considéré comme galiléen
pour des expériences de faible étendue et de courte durée. Ce référentiel est en rotation
par rapport au référentiel géocentrique : véquateur = 463 m.s−1 ; RT = 6,4.106 m ; écart à la
"galiléennité" : a = 3,3.10−2 m.s−2.
2) Deuxième loi de Newton : loi fondamentale de la dynamique
a) Expérience :
:
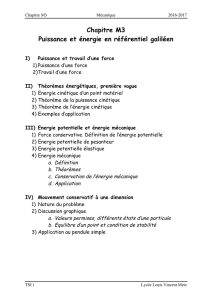
On considère l'enregistrement du mouvement d'un mobile autoporteur relié à un point fixe
C par l'intermédiaire d'un fil tendu, et lancé sur la table à coussin d'air horizontale (T.P.).
En appliquant la technique graphique étudiée dans la leçon précédente, on construit le
vecteur accélération
→
i
a
en un point Mi à partir des vecteurs vitesses
→
−1i
v
et
→
+1i
v
et du
vecteur intermédiaire ∆
→
i
v
=
→
+1i
v
--
→
−1i
v
on obtient :
Les vecteurs accélération
→
3
a
et
→
7
a
sont dirigés vers le point fixe C.
On vérifie sur l'enregistrement que
δv
→
a même direction
et même sens que
T
→ tension du fil.
On peut donc dire que durant un bref intervalle de temps δt
la tension
T
→ du fil (dont la direction radiale est matérialisée
par le fil lui-même) modifie de
δv
→
le vecteur vitesse du
palet autoporteur, avec
T
→
parallèle à
δv
→

Physique - 6 ème année - Ecole Européenne
Ecole Européenne de Francfort Page 27
D'une façon générale, lorsqu'un mobile est soumis à une action de la part du milieu
extérieur sa vitesse varie. Une force appliquée à un solide peut modifier son mouvement
(table à air inclinée, chute libre d'une balle ...).
Nous allons ériger en principe cette correspondance et de plus : m.
δv
→
/δt étant homogène
à des kg.m.s−1/s = kg.m.s−2 = N nous pouvons énoncer :
b) Enoncé :
Dans un référentiel galiléen, la somme vectorielle des forces extérieures appliquées à un
solide est égale au produit de la masse du solide par le vecteur accélération de son C.I..
Σ
→
F
= m.
→
dt
vd G
= m.
aG
→
Nous admettrons que cette formulation n'est valable que si les vitesses misent en jeu (en
particulier vG) restent petites en mesure devant la vitesse de la lumière c : vG << c
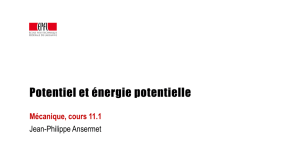
3) Troisième loi de Newton : loi d'interaction
On considère deux solides en interaction.
:
Soit
F1 2→
→
la force qu'exerce le solide n° 1 sur le
solide n° 2 et F2 1→
→
la force qu'exerce le solide n° 2
sur le solide n° 1 :
L'expérience montre que
F1 2→
→
et
F2 1→
→
ont même
direction et même support mais des sens opposés et sont telles que
F1 2→
→
=
F2 1→
→
.
Lorsqu'un système (S1) exerce une force
F1 2→
→
sur un système (S2), le système (S2) exerce
au même instant une force F2 1→
→
sur le système (S1).
Ces deux forces ont même droite d'action et
F1 2→
→
= −
F2 1→
→
Remarque : La Terre, de masse MT, exerce sur un objet de masse m, une force (le poids de
l'objet) de même intensité que celle qu'exerce l'objet sur la Terre !
Mais d'après la deuxième loi de Newton, comme MT >> m, les effets de cette
force sont très différents sur l'objet (qui tombe vers la Terre) et sur la Terre (qui
reste insensible à la présence de l'objet).
II) Travail et puissance d'une force
1)
:
Travail élémentaire
On étudie un objet qui se déplace, un point M de cet objet sur lequel
s'exerce une force
:
→
F
qui n'est pas forcément la cause du déplacement.
Au cours du mouvement, on considère un tout petit déplacement
→
δl
du
point d'application M de la force
→
F
. Durant ce petit déplacement, on peut
considérer la force comme constante.
Par définition le travail élémentaire de
→
F
au cours du petit déplacement
→
δ
l
est :
δW =
→
F
.
→
δl
c'est un produit scalaire,
→
F
et
→
δl
ne sont pas toujours parallèles. On peut faire apparaître
l'angle entre
→
F
et
→
δ
l
:δW =
→
F
.
→
δl
.cos(
→
F
,
→
δl
) = F.δl.cos(
→
F
,
→
δl
)
Remarque : Le travail δW est un scalaire (produit scalaire).
* Si la force est orthogonale au déplacement (cos(
→
F
,
→
δl
) = 0) le travail est nul.
* Si l'angle entre
→
F
et
→
δl
est inférieur à π/2, δW est positif, le travail est dit moteur.
* Si l'angle entre
→
F
et
→
δ
l
est supérieur à π/2, δW est négatif, le travail est dit résistant.

Dynamique et lois de conservation
Page 28 Christian BOUVIER
2) Travail d'une force lors d'un déplacement fini
Le travail effectué par la force
:
→
F
au cours du déplacement de son point d'application, de A
en B, suivant un trajet C, est par définition égal à la somme des travaux élémentaires le long
du trajet C :
→
→BA )F(W
=
BA→
Σ
δW =
BA→
Σ
→
F
.
→
δ
l
Si la force
→
F
varie au cours du déplacement et si le trajet de M est quelconque, cette
somme est en général difficile à calculer. Nous allons considérer quelques cas particuliers.
a) Force localisée et constante :
Si la force
→
F
est constante on peut écrire :
→
→BA )F(W
= BA→
ΣδW = BA→
Σ
→
F
.
→
δ
l
=
→
F
.BA→
Σ
→
δ
l
Géométriquement, on vérifie que
BA→
Σ
→
δ
l
=
→
AB
D'où
→
→BA )F(W
=
→
F
.
→
AB
=
→
F
.
→
AB
.cos(
→
F
,
→
AB
)
Le travail d'une force localisée et constante ne dépend pas du trajet du point d'application
de cette force mais uniquement des positions A et B de départ et d'arrivée.
b) Forces localisée constamment orthogonale au déplacement :
Si la force
→
F
varie au cours du déplacement mais reste constamment orthogonal au
déplacement, on aura : δW =
→
F
.
→
δl
= 0 constamment
Et
→
→BA )F(W
=
BA→
Σ
δW =
BA→
Σ
→
F
.
→
δl
= 0
Le travail d'une force localisée et constamment orthogonale au déplacement de son point
d'application d'un point A à un point B est nul.
c) Forces réparties :
Si la force
→
F
est la somme de deux forces constantes
→
1
F
et
→
2
F
, soit
→
F
=
→
1
F
+
→
2
F
on a :
→
→BA )F(W
=
→
F
.
→
AB
= (
→
1
F
+
→
2
F
).
→
AB
=
→
1
F
.
→
AB
+
→
2
F
.
→
AB
=
→
→BA 1)F(W
+
→
→BA 2)F(W
Remarque : Les actions qui s'exercent sur un mobile à l'échelle macroscopique sont
souvent des actions réparties et dans le cas général, cet ensemble de forces
n'est pas équivalent à une force unique. Dans certains cas l'ensemble de
forces réparties est équivalent à une force unique : poids, poussée
d'Archimède ...
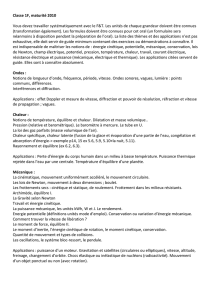
3) Exemple du calcul du travail du poids
L'action de la pesanteur sur un solide est un ensemble de forces réparties équivalent à une
force unique, le poids
:
→
P
appliqué au centre de gravité G du
solide. On a P = m.g
Nous verrons que dans un domaine limité de l'espace le poids
→
P
d'un objet peut être considéré comme une force constante.
Soient A et B les positions départ et d'arrivée de G lors du
déplacement du solide. Le travail du poids est donné par :
→
→BA )P(W
=
→
P
.
→
AB
=
→
P
.
→
AB
.cos(
→
P
,
→
AB
) or, on sait que
→
AB
.cos(
→
P
,
→
AB
) = zA − zB
où zA et zB sont les altitudes des points A et B.

Physique - 6 ème année - Ecole Européenne
Ecole Européenne de Francfort Page 29
On a donc
→
→BA )P(W
= -- m.g.(zB -- zA)
- Si zA > zB (descente)
→
→BA )P(W
> 0 le travail du poids est "moteur" :
→
→BA
)P(W
= m.g.h
- Si zA < zB (montée)
→
→BA
)P(W
< 0 le travail du poids est "résistant" :
→
→BA )P(W
= -- m.g.h
4) Puissance d'une Force
On considère une force
:
→
F
agissant sur un objet en mouvement dans un référentiel galiléen.
A un instant de date t, pour un petit déplacement
→
δl
du point d'application M de la force
d'une durée δt (très petite), le travail élémentaire de la force est : δW =
→
F
.
→
δ
l
.
La puissance instantanée de la force
→
F
, à la date t, est par définition :
P(t) =
t
W
δ
δ
=
→)t(F
.
→
δ
δt
l
=
→)t(F
.
→)t(v
IV) L'énergie en mécanique classique
1)
:
Configurations et états d’un système
On considère un système (S) dont on étudie l'évolution dans un référentiel (R).
:
La donnée des positions des différentes parties du système (S) par rapport à (R), constitue
une "photo instantanée" du système, c'est une configuration du système.
La seule donnée d'une configuration ne permet pas de prévoir l'évolution future du système.
Si en plus des positions des différentes parties du système on se donne leurs vitesses, on
définit un état du système. On distinguera donc une configuration et un état du système (S).
2) Définitions
a) Energie potentielle :
:
L'énergie potentielle EP est définie pour une configuration du système étudié.
On doit choisir une configuration particulière pour définir l'origine des énergies
potentielles, pour cette configuration, on posera donc EP = 0.
L'énergie potentielle d'un système dans une configuration donnée, est égale au travail que
devrait fournir un opérateur extérieur pour faire passer le système, d'une façon quasi-
statique
Remarque : L'énergie potentielle d'un système est la somme des différentes formes de
l'énergie potentielle qui se calculent indépendamment (gravitation, électrique,
élasticité, atomique, nucléaire …). Dans une étude, seules les formes de
l'énergie potentielle susceptibles de varier doivent être exprimées !
, de la configuration choisie pour définir l'origine des énergies potentielles à la
configuration donnée.
b) Energie Cinétique :
L'énergie cinétique EC est définie dans un référentiel donné.
En 6ème année, nous verrons que l'expression de l'énergie cinétique est une conséquence
de la loi fondamentale de la dynamique et de la définition générale de la puissance, en
mécanique classique. Cette année nous donnons la définition :
L'expression de l'énergie cinétique EC d'un objet de masse m, animé d'une vitesse
→
v
dans un référentiel (R) est : EC =
2
1
.m.v2
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%