Cours de Calcul Numérique

Cours de Calcul Numérique
INFO-F-205
G. Bontempi
S. Ben Taieb,
C. Olsen
Département d’Informatique
Boulevard de Triomphe - CP 212
http://www.ulb.ac.be/di
Cours de calcul numérique – p. 1/47

Résolution des équations non linéaires.
•Définition du problème.
•Définition de la convergence.
•Méthodes:
•de la bissection,
•de la corde,
•de la sécante,
•de la fausse position ou Regula Falsi,
•de Newton.
•Itérations de point fixe.
Cours de calcul numérique – p. 2/47

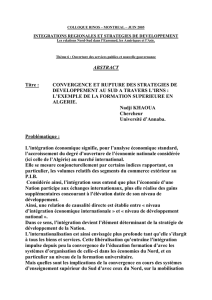
Exemple pratique: balle flottante
Selon le théorème d’Archimede, tout corps plongé dans un fluide reçoit de la
part de celui-ci une poussée verticale dirigée de bas en haut égale au poids
du volume de fluide deplacé par le corps.
x
r−x r
Cours de calcul numérique – p. 3/47

Exemple pratique: balle flottante
•Le volume du fluide deplacé est le volume de la calotte spherique de
hauteur xet rayon r
V=Zx
0
π(r2−(r−x+z)2)dz =1
3πx2(3r−x)
•Le poids du corps sphérique de densité ρest
P=ρ(4πr3)/3
•Supposons que le liquide ait densité unitaire
•Afin de connaître la profondeur de l’immersion de la balle, il faut
résoudre l’équation non linéaire
πx2(3r−x)/3 = ρ(4πr3)/3
qui pour r= 1 peut être simplifiée dans la forme
x3−3x2+ 4ρ= 0
Cours de calcul numérique – p. 4/47

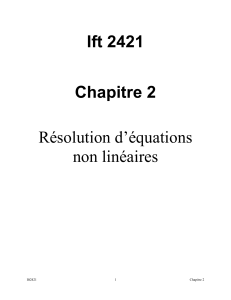
Exemple: cinematique d’un bras robotisé
Considerons le bras d’un robot à deux articulations de longeur d1et d2,
respectivement.
La position du bras peut être décrite par l’angle αque la première articulation
forme avec l’axe horizontale et l’angle βentre les deux articulations.
Supposons de vouloir trouver les valeurs des deux angles tels que l’extremité
de la deuxième articulation se trouve sur un point donné de coordonnées
p1, p2.
2
α
β
1
d2
d
y
x
p1
p
Cours de calcul numérique – p. 5/47
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
1
/
47
100%