Ift2421 1 Chapitre 2
Ift 2421
Chapitre 2
Résolution d’équations
non linéaires

Ift2421 2 Chapitre 2
Introduction
Description:
LW
Sin B
12
=( ) LW
Sin C
21
=( )
B = π - A - C
avec L L L W
Sin BW
Sin C
= + = +
1 2 2 1
( ) ( )
L est une fonction de C maximum si
dL
dC WCos B
Sin BWCos C
Sin C
= −
221
( )
( ) ( )
( )
dL
dC WCos AC
Sin ACWCos C
Sin C
=
−
−
− − −
2212
( )
( ) ( )
( )
π
π

Ift2421 3 Chapitre 2
Méthode de résolution de
l’équation scalaire
F(X)=0
On veut évaluer
numériquement la (ou les)
racines.
G(X) = H(X)
⇔⇔
G(X) - H(X) = 0
Comment est faite la
fonction?
Quelles sont ses propriétés?
Sur quel intervalle en X
ferons-nous la recherche?
Degré 1: aX+b =0
X= -b/a
Degré 2:
Solution impossible si le
degré du polynôme est
supérieur à 4.

Ift2421 4 Chapitre 2
Méthode de bissection
(interval-halving method)
Basée sur une alternance de signe
de part et d’autre de la racine cherchée pour
F(X) = 0
Départ:
X1 et X2 telles que
F(X1) et F(X2) sont de signes opposés
Itérations:
X3 = centre de [ X1, X2 ]
Choisir le bon sous intervalle
Condition suffisante
(de convergence vers une racine):
F est continue sur l’intervalle de recherche [ X1, X2 ]

Ift2421 5 Chapitre 2
-4 -2 2 4
-10
-7.5
-5
-2.5
2.5
5
7.5
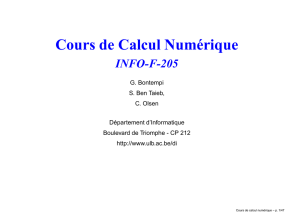
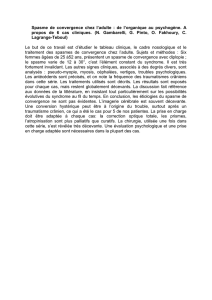
F(X) = ((X+1) X - 3) X - 3
= X3 + X2 - 3 X -3
racine : -1,−3 et 3.
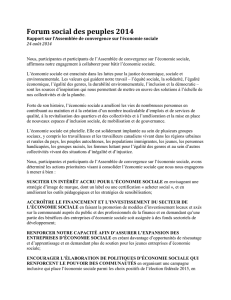
Méthode
de bissection
0.5 1 1.5 2
-4
-3
-2
-1
1
2
3
x1
x2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
1
/
43
100%