contrôleur de rotation avec conversion fréquence-courant

contrôleur de rotation avec conversion fréquence-courant
1 canal
MS22-RI
édition • 2017-04-05T21:34:34+02:00
1 / 2 Hans Turck GmbH & Co.KG ñ D-45472 Mülheim an der Ruhr ñ Witzlebenstraße 7 ñ Tel. 0208 4952-0 ñ Fax 0208 4952-264 ñ [email protected] ñ www.turck.com
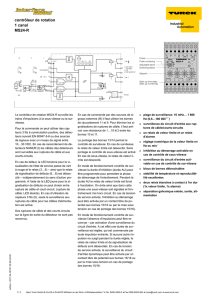
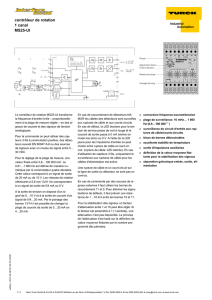
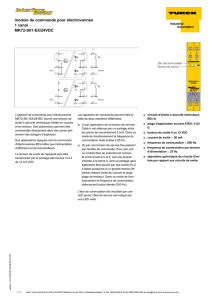
Le contrôleur de rotation du type MS22-RI dis-
pose non seulement d'une sortie par relais
mais également d'une sortie analogique de
0/4…20 mA.
Pour la commande on peut utiliser des cap-
teurs 3 fils à commutation positive, des détec-
teurs suivant EN 60947-5-6 ou des sources
de signaux avec un niveau de signal entre
10…30 VDC. En cas de raccordement de dé-
tecteurs NAMUR les câbles des détecteurs
sont surveillés aux ruptures de câble et aux
courts-circuits.
En cas de défaut, la LED bicolore pour la vi-
sualisation de l'état de service passe de vert à
rouge et le relais de sortie est désexcité – in-
dépendamment du sens de rotation program-
mé. A l'aide de la LED jaune pour la signalisa-
tion de défauts on peut choisir entre rupture
de câble et court-circuit. (rupture de câble:
LED éteinte). En cas d'erreur le courant de
sortie retombe à zéro. Des erreurs dans les
appareils de traitement ou de visualisation
montés en aval peuvent être ainsi reconnues.
En cas d'utilisation de capteurs 3 fils, unique-
ment la surveillance aux ruptures de câble
pour les câbles d'alimentation est active. Des
ruptures de câble et des courts-circuits sur
la ligne de sortie du détecteur ne sont pas
reconnus. En cas de commande par des
sources de signaux externes il faut utiliser les
bornes de raccordement 11 et 9. Pour élimi-
ner les signalisations de défauts, il faut prévoir
une résistance de 1…10 kò entre les bornes
10 et 11.
Le pont à la bornes 12/13 permet le contrôle
de la survitesse: En cas de survitesse, le re-
lais de valeur limite est désexcité. Sans pon-
tage, le contrôle de sous-vitesse est activé:
En cas de sous-vitesse, le relais de valeur li-
mite est désexcité.
Les vitesses de rotations sont contrôlées en
appliquant la méthode de mesure de la durée
entre deux impulsions. Des temps de réac-
tion courts même dans des applications avec
des durées d'impulsions relativement impor-
tantes sont ainsi possibles. Pour des applica-
tions de régulation et de visualisation, une vi-
tesse de rotation proportionnellement au si-
gnal analogique est disponible. Par le pontage
des bornes 13/14 il est possible de program-
mer le signal analogique de 0…20 mA à 4…
20 mA.
La valeur finale de la plage de surveillance est
réglée de manière numérique par deux com-
mutateurs rotatifs à la face frontale de l'appa-
reil; à celle-ci est accordé un courant de sor-
tie de 20 mA. Au-dessous de 0,6 min-1 le cou-
rant de sortie est de 0/4 mA. Par un deuxième
commutateur rotatif il est possible de pro-
grammer le point de commutation entre 10…
100 % de la fin de la plage dans la plage sé-
lectionnée. L'état de commutation du relais de
sortie est visualisé par une LED jaune.
En mode de fonctionnement contrôle de sous-
vitesse la durée d'inhibition (durée AU) peut
être programmée pour permettre la phase de
démarrage de l'entraînement. Pendant la du-
rée AU le relais de sortie est forcé à l'excita-
tion. On évite ainsi qu'une sous-vitesse soit
signalée et l'entraînement mis hors circuit.
En cas de tension de service activée, l'inhi-
bition au démarrage peut être activée par un
contact libre de potentiel aux bornes 15/16 ou
par la mise sous tension en cas de pontage
des bornes 15/16).
■contrôle de sous-vitesse ou de survi-
tesse
■plage de surveillance: 10 mHz… 1 666
Hz (0,6…100 000 min-1)
■surveillance du circuit d'entrée aux rup-
tures de câble/courts-circuits
■blocs de bornes débrochables
■commande par détecteurs suivant
EN60947-5-6 avec surveillance du cir-
cuit d'entrée, par détecteur trois fils,
pnp ou par source de signaux avec un
niveau des signaux de 10…30VDC
■1 sortie par relais avec un contact inver-
seur
■sortie analogique 0…20mA ou 4…20mA
■stabilité de température et de linéarité
excellentes
■inhibition au démarrage activable
■séparation galvanique entrée, sortie, ali-
mentation

contrôleur de rotation avec conversion fréquence-courant
1 canal
MS22-RI
édition • 2017-04-05T21:34:34+02:00
2 / 2 Hans Turck GmbH & Co.KG ñ D-45472 Mülheim an der Ruhr ñ Witzlebenstraße 7 ñ Tel. 0208 4952-0 ñ Fax 0208 4952-264 ñ [email protected] ñ www.turck.com
Type MS22-RI
No. d'identité 0508010
Tension nominale alimentation en tension de grande portée
Tension de service 20…250 VAC
Fréquence 40…70 Hz
Plage de tension de service 20…250 VDC
Puissance absorbée ð 3 W
Plage de surveillance/plage de réglage ð 0.06…100000 min-1
Fréquence d'entrée max. 150000 min-1
Temps d'impulsion ï 0.02 ms
Intervalle d'impulsion ï 0.02 ms
Entrée NAMUR
NAMUR EN 60947-5-6
Tension à vide 8.2 VDC
Courant de court-circuit 8.2 mA
Résistance d'entrée 1 kò
Résistance de ligne ð 50 ò
Seuil d'enclenchement 1.75 mA
Seuil de déclenchement 1.55 mA
Seuil de rupture de câble ð 0.06 mA
Seuil de court-circuit ï 6.4 mA
Entrée trois fils
Tension à vide 15 VDC
Courant ð 30 mA
Signal 0 0...3VDC
Signal 1 5...30 VDC
Source de signal externe
Signal 0 0…3 VDC
Signal 1 5…30 VDC
Résistance d'entrée 26000 ò
Courant de sortie 0/4…20 mA
Résistance de charge sortie de courant ð 0.6 kò
Circuits de sortie (digitaux) 1 x relais (contact inverseur)
Tension de commutation relais ð 30 VDC / ð 250 VAC
Courant de commutation par sortie ð 2 A
Puissance de commutation par sortie ð 500 VA/60 W
Fréquence de commutation ð 10 Hz
Qualité de contact AgNi, 3µ Au
Précision de mesure (y compris la linéarité,
l’hystérésis et la reproductibilité)
ð 0.1 % de la valeur finale
Dérive en température ð 0.005 % / K
Séparation galvanique
Tension d'essai 2.5 kV
Indications
Etat de service vert
entrée d'impulsions jaune
Etat de commutation Jaune
Signalisation de défaut Rouge
Mode de protection IP20
Température ambiante -25…+60 °C
Humidité atmosphérique relative ð 95 %
Dimensions 75 x 50 x 110 mm
Poids 244 g
Conseil de montage Montage sur rail symétrique (NS35) ou plaque de
montage
Matériau de boîtier Polycarbonate/ABS
Raccordement électr. 2 x blocs de bornes débrochables à 8 pôles, protec-
tion contre les inversions de polarité, raccordement
par vis
Section de raccordement 1 x 2.5 mm2 / 2 x 1.5 mm2
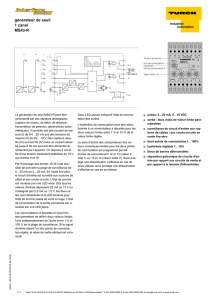
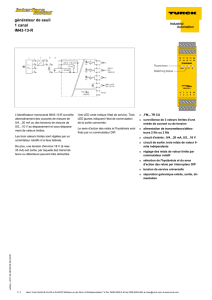
dimensions
Relais de sortie – courbe de charge
Relais de sortie – durée de vie électrique
1
/
2
100%