STI GE

842525
COMMANDE DES FOURS INDUSTRIELS
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
STI GE
Lycée RENAUDEAU
page 84
Electrotechnique
2-2-3-5 Fonction commander la puissance
1- Définition du problème
Le but d’un système d’électrothermie est de porter à une température définie une pièce ou un
ensemble de pièces pour qu'elles subissent un séchage, une cuisson, un traitement thermique
etc. Les pièces peuvent être placées dans une enceinte thermique isolée ou dans une cuve
contenant un liquide qu'il faut chauffer.
2- Présentation
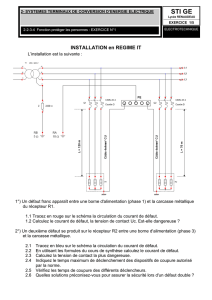
Dans la plupart des applications, on retrouve le schéma bloc suivant.
Le régulateur a pour fonction de maintenir la température constante quelque soit les paramètres
(consigne de température, perturbation...).
Le gradateur a pour fonction de moduler l'énergie électrique transmise au convertisseur (four).
Le four permet de convertir l’énergie électrique modulée en énergie calorifique.
Le capteur permet la conversion de la température en un signal électrique.
REGULATEUR
W : X :
L1
L2
L3
RESEAU
REGULATEUR GRADATEUR FOUR CAPTEUR

852525
COMMANDE DES FOURS INDUSTRIELS
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
STI GE
Lycée RENAUDEAU
page 85
Electrotechnique
2-2-3-5 Fonction commander la puissance
3- La régulation de température
Le procédé de régulation a pour rôle d'amener une grandeur physique à prendre une valeur fixée à
l'avance et de l'y maintenir. Celle-ci s'appelle grandeur réglée ou mesure; elle peut être de nature
très variable comme par exemple :
* une grandeur physique : tension, courant, puissance...
* une grandeur hydraulique ou mécanique : pression, débit, niveau, vitesse...
* une grandeur thermique : température, quantité de chaleur...
* toute autre grandeur physique
La valeur fixée à l'avance, à laquelle la régulation doit amener la grandeur réglée (X), s'appelle
consigne de régulation (W)
3-1.
Chaîne de régulation :
•
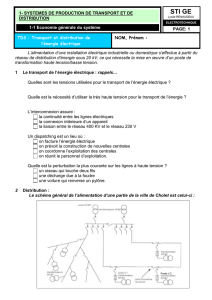
Système en boucle ouverte
En imposant une consigne en entrée, l'organe de commande impose au système une
modification de sa sortie. Mais dans une régulation, ce qui est recherché c'est que la grandeur
réglée atteigne une valeur proche de la consigne et se stabilise autour de celle-ci. Or sur la
figure ci-dessous, il n'y a aucune information de l'état de la sortie par rapport à l'état de
l'entrée. En conséquence, l'organe de commande pilote le système à partir de la consigne
sans savoir dans quel état se trouve la sortie (soumise à des perturbations de tout ordre). On
ne peut avoir de régulation. On dit que le système travaille en boucle ouverte.
•
Système en boucle fermée
Pour avoir régulation, il faut mesurer en permanence la grandeur réglée (X) et la comparer à
la consigne de régulation (W). Dès que l'on détecte un écart (ε) entre elles, on produit sur le
système une modification appropriée qui doit ramener la grandeur réglée (X) en accord avec
la consigne de régulation (W).
La grandeur subissant cette modification s'appelle grandeur réglante (Y). Ce peut être une
grandeur physique quelconque, par exemple la position d'ouverture d'une vanne, l'angle de
conduction d'un thyristor d'une unité de puissance, le rapport cyclique d'enclenchement d'un
contacteur. Il faut néanmoins choisir, comme grandeur réglante dans un système, une
grandeur telle que sa variation agisse directement sur la grandeur réglée.
La modification sur la grandeur réglante (Y) peut se faire :
*manuellement par un opérateur observant en permanence la grandeur réglée et
modifiant en conséquence la grandeur réglante
*automatiquement au moyen d'appareils appelés régulateurs et dans lesquels sont
implantés une loi de commande (algorithme).

862525
COMMANDE DES FOURS INDUSTRIELS
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
STI GE
Lycée RENAUDEAU
page 86
Electrotechnique
2-2-3-5 Fonction commander la puissance
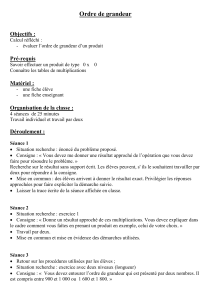
En mode automatique, l'intervention humaine se limite à l'affichage de la consigne. On peut
donc compléter le diagramme précédent comme suit :
Le régulateur va donc calculer la loi de commande en fonction de la consigne et de l'état de la sortie,
ce qui permettra d'agir sur le système qui travaille alors en boucle fermée.
Notations utilisées :
W: consigne de régulation
X: grandeur réglée
ε : Ecart consigne- mesure (W-X)
Y: grandeur réglante (niveau de sortie du régulateur) Y=f(ε
,t) dépend de la loi de commande
du régulateur.
REGULATEUR
W : X :
Modulateur
Correcteur
Mini-four (convertir
une énergie Elec en
énergie calorifique)
Capteur
X
Grandeur
réglée
W
Y
Energie
électrique
X
ε
= W – X
Ecart

872525
COMMANDE DES FOURS INDUSTRIELS
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
STI GE
Lycée RENAUDEAU
page 87
Electrotechnique
2-2-3-5 Fonction commander la puissance
•
Représentation symbolique d'une régulation
Les différents éléments de ce schéma constituent le principe d'une régulation quelle qu'elle soit.
Remarque : On trouve aussi le terme d'asservissement qu'il faut bien distinguer de la régulation
même si le principe de fonctionnement reste le même.
REGULATION: maintenir la grandeur réglée à une valeur égale à celle de la consigne malgré les
perturbations indésirables (ex : régulation de température d'un four). On peut dire que la consigne est
constante (ou variant par paliers de réglage), le signal de sortie cherchant à rester stable quelles que
soient les perturbations.
ASSERVISSEMENT: asservir la grandeur réglée aux variations voulues de la consigne et ce en
considérant que les perturbations extérieures ne varient pas (ex : asservissement de position d'une
table traçante). On peut donc dire que la consigne varie constamment, le signal de sortie cherchant à
suivre le plus fidèlement possible les fluctuations du signal d'entrée.
3-2 Qualités d’une régulation :
3-2-1 La précision
C’est l’écart ε entre la valeur de consigne et la valeur effectivement réglée.
Un système est précis si la sortie suit l'entrée en toutes circonstances. On distingue deux types
de précision:
- la précision statique (c'est celle qui est définie en fonctionnement stable)
- la précision dynamique (C'est celle qui est définie lors de variations brusques).
On peut qualifier ces précisions en analysant:
- l'écart final entre la consigne et la mesure (Ecart statique)
- la réponse à une perturbation

882525
COMMANDE DES FOURS INDUSTRIELS
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
STI GE
Lycée RENAUDEAU
page 88
Electrotechnique
2-2-3-5 Fonction commander la puissance
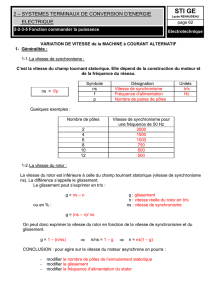
3-2-2 La rapidité
Un système a une rapidité satisfaisante s'il se stabilise à son niveau constant en un temps jugé
satisfaisant.
On peut la qualifier en analysant:
- Le temps de montée en température
Il correspond au temps nécessaire pour atteindre 95% de la valeur finale à partie de l’instant
d’application de la consigne.
- Le temps de réponse à x% de la valeur final
Il correspond au temps nécessaire pour entrer dans une bande de +/- x% de la valeur finale et ne
plus en sortir.
Exemple : temps de réponse à +/- 5% :
3-2-3 La stabilité
Le système constitué du procédé et de la boucle de régulation est dite stable si, soumis à une
perturbation ou une variation de consigne, la grandeur réglée retrouve un état stable.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%