Mesures cinématiques et dynamiques en fin de phase

13ième Congrès Francophone de Techniques Laser, CFTL 2012 - ROUEN, 18 – 21 Septembre 2012
Mesures cinématiques et dynamiques en fin de phase
d’allongement du crawl
Mathias SAMSON, Anthony BERNARD, Laurent DAVID
Institut P', CNRS- Université de Poitiers - ENSMA, UPR 3346,
11 Boulevard Marie et Pierre Curie, Téléport 2, BP 30179, 86962 Futuroscope Cédex, France
Résumé
Cet article présente les résultats d’une étude expérimentale visant à définir le rôle de la phase
d’allongement en crawl aux allures caractéristiques de nage. L’écoulement autour de la main et
de l’avant-bras, étudié dans un bassin des carènes sur un bras moulé, est déterminé à partir de
mesures PIV-2D. Ces mesures sont complétées par des mesures d’efforts, effectuées à l’aide
d’une balance dynamométrique, permettant la caractérisation de la portance et la traînée. Il
apparaît que ces dernières sont d’autant plus grandes que la vitesse et l’angle d’incidence
augmentent. Reconfigurer dans le cadre de course, ces forces ne sont pas propulsives. Elles
participent à l’équilibre global de nage en compensant les efforts verticaux descendant créés par le
bras opposé.
Mots clés : phase d’allongement, crawl, PIV, mesure d’efforts.
1 Introduction
La phase d’allongement en crawl est traditionnellement définie comme une phase servant à placer
les segments loin devant et à diminuer la résistance à l’avancement. Cette phase, qui débute par
l’entrée de la main dans l’eau et se termine lorsque la main opposée sort de l’eau, est une des
moins étudiées car considérée comme non propulsive [1]. Cependant, aucune étude n’a analysé
l’écoulement de l’eau autour des membres supérieurs. Caractériser le comportement
hydrodynamique autant à l’intrados qu’à l’extrados de la main et l’avant-bras permettrait pourtant
de mieux comprendre le rôle de cette phase au sein de la coordination globale de nage. En outre,
peu d’études d’écoulement ont été réalisées en natation sportive : depuis une vingtaine d’années,
seules quelques expérimentations, ont été réalisées au moyen de mur de bulles, de filaments,
d’injection de colorant et de visualisations particulaires. Depuis maintenant dix ans, des études
plus complètes par CFD et PIV cherchent à évaluer plus finement les champs hydrodynamiques
autour des nageurs [2], [3]. C’est dans ce cadre que ce situe notre étude expérimentale, dont les
objectifs viseront à analyser les champs de vitesses de l’écoulement et à mesurer les efforts
extérieurs appliqués sur la main et l’avant-bras pour différentes vitesses de nage du crawl.
2 Descriptifs expérimentaux
Les essais expérimentaux ont été réalisés dans le bassin des carènes de l’institut Pprime à
Poitiers. Ce bassin mesure 21 m de long, 1.5 m de large pour une hauteur d’eau maximale de 1.2
m. Il permet d’effectuer des mesures allant de 0.2 à 2.35 m.s-1.
Pour étudier l’écoulement autour du bras du nageur, nous avons utilisé un moule en résine époxy
transparente, à échelle 1, d’un bras de nageur élite. Les données cinématiques sont issues d’une
analyse préalablement effectuée en bassin d’entraînement, à partir de trois nageurs de niveau
national (Tableau 1). Elle a porté sur le crawl, aux allures caractéristiques de sprint, demi-fond et
fond. L’extrémité du troisième doigt a servi de repère pour le suivi des points (Figure 1). L’angle
d’incidence (α) est formé par le vecteur vitesse et l’axe coude-extrémité du troisième doigt. Les
coordonnées ont été exprimées dans le repère lié au bassin (repère GLOBAL), orthonormé direct
(X’, Y’, Z’), X’ étant l’axe d’avancement du nageur à la surface de l’eau. Les données sont celles
obtenues pour un seul de ces trois nageurs, et représentent les caractéristiques moyennes de
l’ensemble des différents passages. L’entrée de la main dans l’eau marque l’origine du repère (X’,
Y’, Z’). La phase est divisée en deux sous-phases : une d’étirement, proche de la surface avec un
angle d’incidence nul (points sur la figure 1) qui sert à positionner la main le plus loin possible

devant. L’autre, de rotation vers le bas où l’angle d’incidence augmente continuellement (points
sur la figure 1).
Sprint
Demi-
fond
Fond
V (m.s-1)
2,35
2
1,8
α (deg)
30°
25°
15°
Profondeur
(cm)
19
16
10
Tableau 1 - Données cinématiques de
la main à la fin de la phase
d’allongement en crawl
Figure 1 - Position du nageur en fin de
phase d’allongement en crawl.
L’étude expérimentale s’est appuyée sur deux types d’analyse : l’une dynamique, effectuée à partir
d’une balance à jauges de déformation, et l’autre cinématique par la méthode PIV. Le moulage du
bras est fixé sur le chariot, posé sur deux rails le long du bassin, et qui se translate à vitesse
uniforme, réglable d’un poste de contrôle. L’angle d’incidence se règle, de 5 en 5 degrés, à partir
d’une rotule. La profondeur est obtenue en remplissant ou vidant le bassin. Notre analyse s’appuie
sur l’hypothèse d’équivalence entre l’étude de l’écoulement d’un fluide animé d’une vitesse
V
autour d’un profil immobile, et celle du mouvement de ce même corps à la vitesse uniforme -
V
dans le fluide au repos. Un repère (X, Y, Z) orthonormé direct (repère LOCAL), lié au charriot. (X,
Y) représente le plan de surface libre et X l’axe d’avancement du chariot. Compte tenu des
configurations du bassin des carènes, et des angles d’incidence à respecter, le bras est orienté
vers le haut.
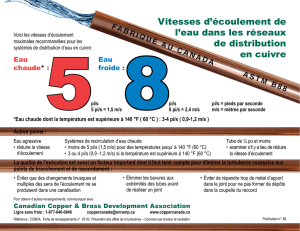
2.1 Dispositif et mesure de l’écoulement à partir de la méthode PIV
Afin de caractériser au mieux le comportement hydrodynamique de l’eau autour du profil, nous
choisissons le plan de mesure (X, Z) passant par milieu du poignet et du troisième doigt (Figure 2).
Cette zone est la plus susceptible de nous fournir des informations sur le type d’écoulement
engendré par l’action de la main sur l’eau. La résine transparente laisse passer le faisceau laser,
et permet un éclairement du plan de mesure, autant à l’extrados qu’à l’intrados du profil.
Figure 2 - Profil du bras éclairé par le laser embarqué sur le chariot et plan de mesure

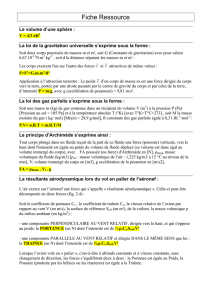
Le dispositif de mesure PIV, embarqué sur le chariot, est constitué d’un laser Nd-YAG double
cavité (Quantel CFR 200), d’un ordinateur, et d’une caméra CCD. (Figures 3-a et 3-b). L’ordinateur
embarqué traite et stocke les données. Il est relié, par une liaison ethernet, à un autre ordinateur
qui sert de commande à distance.
Figure 3-a - Photo du dispositif au
passage d’un hublot
Figure 3-b - Dispositif de mesure PIV avec
laser et caméra embarqués
Le laser, qui émet en lumière verte (λ= 532 nanomètres), éclaire les particules ensemencées dans
l’eau (particules de polyamides de diamètre 50 µm). Le faisceau laser est guidé, à partir de la
cavité, par des miroirs au sein d’un tube, et, en sortie, est transformé en plan laser par trois
lentilles (deux sphériques et une cylindrique). Celle-ci est placée derrière le bras de façon à
illuminer notre plan d’étude.
L’acquisition se fait à l’aide d’une caméra monochrome CCD placée perpendiculairement à la
nappe et relié physiquement au chariot par deux supports Norcan (Figure 3-a). Sa résolution
maximale est de 2048 x 2048 pixels. L’acquisition a été faite à l’aide du logiciel HIRIS, le champ
d’intérêt est de 280 x 140 mm. L’objectif de la caméra est de 50 mm. Des photocellules, placées
sur les rails, déclenchent, au passage des hublots, le fonctionnement simultané du laser et de la
caméra. La caméra prend 4 paires d’images à chaque passage du hublot (f=12.5 Hz) aux allures
du fond et demi-fond, et 3 paires à l’allure du sprint. L’acquisition se fait sur trois hublots. Le temps
entre deux impulsions laser (Δt) est calculé en fonction de la vitesse d’avancement et la taille des
fenêtres d’interrogation. Le déplacement d’une particule ne devant pas excéder un quart de la
taille d’une fenêtre (Tableau 2). Δt se règle à l’aide d’un générateur de délai EG (R&D Vision) qui
permet de synchroniser les signaux.
!!
"#$"#!%&$'()!
*+$*+!%&$'()!
,"$,"!%&$'()!
+-*.!/0)1,!
2*+!
#""!
+**!
+!/0)1,!
,32"!
.#4!
+5#!
,-4!/0)1,!
,+,4!
"34!
*3#!
Tableau 2 - Calcul du temps (Δt) en µs entre deux images en fonction
de la vitesse d’écoulement et de la taille des fenêtres d’interrogation.
La corrélation croisée entre deux images successives, est effectuée à l’aide du logiciel Davis 7.2.
(LaVision). Nous utilisons une méthode adaptative multipasse en diminuant progressivement la

taille des fenêtres d’interrogation. Le traitement itératif débute par deux passes sur des fenêtres de
64x64 pixels, puis deux passages à 32x32 pixels et enfin trois passages à 16x16 pixels. Des
algorithmes de déformation d’images ont été utilisés. Un pré traitement d’image a été opéré en
masquant le profil afin, d’une part, de permettre au logiciel de mieux corréler aux abords proches
du profil (limiter les effets de reflets du laser sur les bords), et d’autre part de ne pas corréler à
l’intérieur du profil.
Moins de 1% des vecteurs sont faux et aucun post traitement n’a été appliqué.
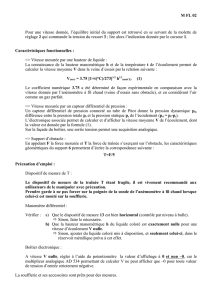
2.2 Mesure des efforts à partir de la balance à jauges de déformation :
Cet appareil permet de mesurer les efforts extérieurs appliqués sur un solide. Le principe de la
balance repose sur la mesure des déformations des jauges, résistances montées en pont de
Wheatstone, et dont la tension varie en fonction des déformations du support sur lesquelles elles
sont collées. Les mesures instantanées de tensions, en Volt, sont ensuite transformées en Newton
grâce à une matrice, construite à partir d’une calibration. L’incertitude de mesure est de ± 2
Newton.
L’ensemble (balance, alimentation, amplificateur six voies) est fixé sur le chariot (Figure 4). Les
données enregistrées par l’ordinateur sont six tensions qui traduisent trois forces : la traînée qui
est mesurée selon l’axe X, la portance selon Z et la dérive selon Y, ainsi que trois moments :
lacets ( / axe Z), roulis ( / axe X), tangage ( / axe Y). Nous ne retiendrons, dans le cas de cette
étude, que les forces de portance et de traînée. Les configurations cinématiques sont les mêmes
que celles effectuées lors de l’étude PIV.
3 Résultats
Nous disposons maintenant, de champs relativement précis, pour chacune des allures
caractéristiques de nage.
3.1 Champ de vitesses
3.1.1 Analyse+qualitative+
Figure 4 - Chaîne d’acquisition effectuée à partir d’une balance à jauges

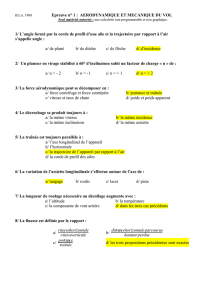
Sprint
Demi-fond
Fond
Figure 4 - Champs de vitesses autour du profil à différentes allures de nage
Les plus grandes survitesses se produisent sur l’articulation métacarpe-phalange (MP) et la
courbure du pouce. Les sous-vitesses ont lieu sur la paume de la main, sur les intrados et
extrados de l’avant-bras. La protubérance du pouce induit une survitesse sur l’intrados, aux trois
allures. A noter ici que le pouce est collé à la main ce qui n’est pas toujours le cas lors de la nage
du crawl. Il existe une sous vitesse sur l’extrados après l’articulation MP. Un sillage se forme à
l’aval de l’articulation MP, amplifiant sans doute la diminution de la vitesse, engendrée par la
géométrie divergente du profil.
3.1.2 Analyse+quantitative+
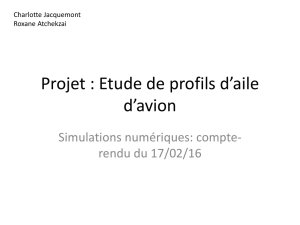
Sprint
Demi-fond
Fond
Figure 5 - Champs du rapport de la vitesse locale sur la vitesse à l’infini à différentes allures
de nage
Plus l’allure est élevée et plus le rapport de vitesse est important et localisé sur une grande surface
du profil. En sprint, il existe des rapports significatifs sur l’extrados (supérieur à 1.1) et l’intrados
(0.8 sur la paume et proche de 0.5 sur l’intérieur de l’avant-bras), qui traduisent une accélération
du fluide sur le dessus des doigts, et un ralentissement, provoqué par l’inclinaison du profil, sur
l’intrados, sauf sur la partie saillante du pouce qui a tendance à accélérer l’écoulement. En demi-
fond, nous retrouvons la même configuration, mais dans des proportions moindres (surface moins
étendue). En fond, la configuration du profil (angle faible) créée assez peu de différences de
vitesses : quelques survitesses localisées sur les parties saillantes du profil (articulation MP et
proéminence du pouce). Pour les trois allures, nous notons un ralentissement de la vitesse, à l’aval
de l’articulation MP, et qui peut s’expliquer, d’une part par la forme divergente du profil, et d’autre
part, par la formation d’un sillage.
3.2 Champ de pression
Les pressions seront approximées à partir du théorème de BERNOULLI (Éq.1). Nous faisons en
effet l’hypothèse d’un écoulement permanent 2D de fluide parfait dans cette région de la main, car
il n’apparaît que peu de zones tourbillonnaires.
2
i
V
2
1
i
P
2
V
2
1
Pρ+=
∞
ρ+
∞
(Éq.1)
avec
P∞ pression motrice à l’amont lointain du fluide,
V∞ vitesse de l’eau à l’amont lointain de la main. (2,35 m.s-1 en sprint, 2 m.s-1 en demi-fond et 1,8
m.s-1 en fond). Vi et Pi sont respectivement les vitesses et les pressions motrices d’une particule
fluide se trouvant dans la zone autour du profil.
 6
7
8
6
7
8
1
/
8
100%