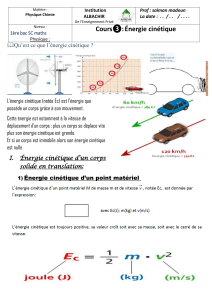
Mécanique 5 Mouvement d`un solide en rotation autour d`un axe fixe

Mécanique 5 Mouvement d’un solide en rotation
autour d’un axe fixe
Lycée Polyvalent de Montbéliard - Physique-Chimie - TSI 1 - 2016-2017
Contenu du programme officiel :
Notions et contenus Capacités exigibles
Définition d’un solide. - Distinguer un solide d’un système déformable.
Translation. - Reconnaître et décrire une translation rectiligne, une translation circu-
laire.
Rotation autour d’un axe fixe. - Décrire la trajectoire d’un point quelconque du solide et exprimer sa
vitesse en fonction de sa distance à l’axe et de la vitesse angulaire.
Moment cinétique scalaire d’un solide en rotation au-
tour d’un axe.
Moment d’inertie.
- Utiliser la relation pour le solide entre le moment cinétique scalaire, la
vitesse angulaire de rotation et le moment d’inertie fourni.
- Relier qualitativement le moment d’inertie à la répartition des masses.
Moment d’une force par rapport à un axe orienté.
Couple.
Liaison pivot.
- Calculer le moment d’une force par rapport à un axe orienté.
- Définir un couple de forces, le moment d’un couple.
- Définir une liaison pivot et justifier la valeur du moment.
- Faire le lien avec les torseurs d’actions vus en SII, distinguer moment et
résultante.
Loi scalaire du moment cinétique appliquée au solide en
rotation autour d’un axe fixe orienté dans un référentiel
galiléen.
- Déterminer l’équation du mouvement, le moment d’inertie du solide par
rapport à l’axe de rotation étant donné.
Pendule pesant. - Établir l’équation du mouvement.
- Expliquer l’analogie avec l’équation de l’oscillateur harmonique.
- Établir une intégrale première du mouvement.
- Lire et interpréter le portrait de phase : bifurcation entre un mouvement
pendulaire et un mouvement révolutif.
- Utiliser un logiciel d’intégration numérique ou des simulations pour
mettre en évidence le non isochronisme des oscillations.
-Réaliser l’acquisition expérimentale du portrait de phase d’un
pendule pesant. Mettre en évidence une diminution de l’énergie
mécanique du pendule.
Énergie cinétique d’un solide en rotation. - Utiliser l’expression de l’énergie cinétique, le moment d’inertie étant
fourni.
Loi de l’énergie cinétique. - Constater l’équivalence dans ce cas entre la loi scalaire du moment ciné-
tique et celle de l’énergie cinétique.
En gras les points devant faire l’objet d’une approche expérimentale.
Table des matières
1 La cinématique du solide 2
1.1 Définitiond’unsolide.......................................... 2
1.2 Translation ............................................... 2
1.3 Rotation autour d’un axe fixe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Moment cinétique scalaire d’un solide en rotation 3
2.1 Moment cinétique scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Moment d’inertie d’un solide par rapport à une axe . . . . . . . . . . . . . . . . . . . . . . . . 3
3 Moment scalaire d’une force 3
3.1 Moment d’une force par rapport à un axe orienté . . . . . . . . . . . . . . . . . . . . . . . . . 3
3.2 Coupledeforces ............................................ 4
3.3 Laliaisonpivot............................................. 4
4 Théorème du moment cinétique 5
5 Exemple du pendule pesant 5
6 Théorèmes énergétiques 7
6.1 Énergie cinétique d’un solide en rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
6.2 Théorème de l’énergie cinétique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Maxime Champion - www.mchampion.fr 1/7

Mécanique 5 : Mouvement d’un solide en rotation autour d’un axe fixe Maxime Champion
1 La cinématique du solide
1.1 Définition d’un solide
Définition. Un solide est un système matériel dont les distances entre les divers points qui le constituent
restent constantes au cours du temps.
Si les distances varient au cours du temps, comme par exemple pour les gaz ou les liquides, le système est
dit déformable.
Pour repérer un solide dans l’espace, il faut six paramètres :
trois coordonnées d’un point du solide ;
trois angles qui définissent l’orientation de trois axes liés au solide.
1.2 Translation
Considérons un solide dans un référentiel R.
Définition. Un solide est en mouvement de translation par rapport à Rlorsque les directions des trois
axes attachés au solide restent fixes au cours du temps.
En conséquence, tous les points du solide possèdent le même mouvement. Les vecteurs déplacements sont
identiques pour tous les points. Tous les points du solide possèdent le même vecteur vitesse. La connaissance
du mouvement d’un des points permet de connaître le mouvement du solide.
ILa translation rectiligne
Le mouvement de translation est rectiligne, lorsque que le mouvement de l’un quelconque des points
est un mouvement rectiligne. Il en est de même du mouvement des autres points. Ce mouvement rectiligne
pouvant être uniforme ou non uniforme.
Exemple 1 : Une cage d’ascenseur ou une voiture circulant sur une route droite sont en
translations rectilignes.
ILa translation circulaire
Le mouvement de translation est circulaire, lorsque que le mouvement de l’un quelconque circulaire,
des points est circulaire. Il en est de même du mouvement des autres points.
Exemple 2 : Le mouvement des nacelles d’une grande roue est une translation circulaire
(animation [1]).
1.3 Rotation autour d’un axe fixe
Considérons un solide dans un référentiel Ret ∆un axe fixe dans ce référentiel.
Définition. Un solide est en mouvement de rotation autour de l’axe axe fixe ∆par rapport au référentiel
Rlorsque tous les points du solide possèdent un mouvement circulaire autour de cet axe.
En conséquence, tous les points du solide ont la même vitesse angulaire.
Les axes sont orientés avec la règle de la main droite : le pouce oriente l’axe fixe ∆et la courbure des
autres doigts indique le sens de rotation.
IVitesse de rotation
Soit un solide Σen rotation à la vitesse angulaire ˙
θautour de l’axe fixe ∆. Soit un point Mquelconque
appartenant à Σ. Notons Hle projeté orthogonal de Msur l’axe ∆et rla distance HM. Ces notations
sont représentées figure 1.
Dans ce cas, le point Mest en rotation autour de Het est animé d’une vitesse
#”
v(M/R) = r˙
θ#”
eθ.(1.1)
2/7

Mécanique 5 : Mouvement d’un solide en rotation autour d’un axe fixe Maxime Champion
(∆)
˙
θ
Σ
•M
r
H
Fig. 1 – Solide en rotation autour d’un axe fixe. Le point Hest le projeté orthogonal du point Msur l’axe ∆.
Application 1 : La vitesse de rotation du rotor d’une éolienne est d’environ 12 tours/minutes.
Sachant que certaines pales ont une longueur de 60 m, en déduire la vitesse de l’extrémité de la pale.
2 Moment cinétique scalaire d’un solide en rotation
2.1 Moment cinétique scalaire
Définition. Soit un solide Σen rotation à la vitesse angulaire ˙
θautour de l’axe fixe ∆dans le référentiel
R. Le moment cinétique scalaire L∆/Rpar rapport à l’axe ∆est définit par
L∆/R=J∆˙
θ(2.1)
avec J∆le moment d’inertie du solide par rapport à l’axe ∆(en kg ·m2). Le moment cinétique est
kg ·m2·s−1.
Le moment cinétique joue le même rôle pour une rotation que la quantité de mouvement pour une
translation.
2.2 Moment d’inertie d’un solide par rapport à une axe
Considérons le solide de la figure 1. La distribution de masse du solide autour de l’axe ∆facilite ou
freine la rotation. Tout comme la masse caractérise la faculté d’un solide à se déplacer, le moment d’inertie
par rapport à un axe J∆caractérise la faculté d’un solide à tourner autour d’un axe ∆.
On peut montrer que J∆=RΣdm r2avec rla distance de l’élément d’intégration à l’axe ∆. Autrement
dit, plus la masse est éloignée de l’axe de rotation, plus le moment d’inertie augmente et donc plus il sera
difficile de mettre le solide en rotation autour de cet axe.
Par exemple, le moment cinétique par rapport à son axe central d’un cylindre plein de masse Met de
rayon Rvaut J=MR2/2. Un cylindre creux de même masse totale et de rayon intérieur R1et de rayon
extérieur R2vaut J=M(R2
1+R2
2)/2. Autrement dit, le moment d’inertie du cylindre creux est plus élevé,
il sera plus difficile de le mettre en rotation.
Sachant que le moment cinétique est une grandeur conservée, un patineur qui tourne en ouvrant ou en
fermant les bras modifie son moment d’inertie, et donc sa vitesse de rotation.
3 Moment scalaire d’une force
3.1 Moment d’une force par rapport à un axe orienté
Définition. Considérons dans un référentiel Run point matériel Msoumis à une force #”
F. Soit ∆un axe
passant par un point Ade vecteur unitaire #”
e∆. On appelle moment de la force
#”
Fpar rapport à l’axe
∆
M∆(#”
F) = −−→
AM ∧#”
F·#”
e∆.(3.1)
C’est un scalaire et son unité est le newton-mètre (N·m).
3/7

Mécanique 5 : Mouvement d’un solide en rotation autour d’un axe fixe Maxime Champion
Remarque : Le produit vectoriel entre deux vecteurs est un vecteur orienté selon la règle de
la main droite. Par ailleurs, soit deux vecteurs #”
aet #”
b, on a
|#”
a∧
#”
b|=|#”
a| |
#”
b|sin θ
avec θl’angle formé par les deux vecteurs. Deux vecteurs colinéaires ont un produit vectoriel
nul.
On peut montrer que ce moment est indépendant du choix du point Asur l’axe ∆. Par ailleurs, si la
force s’applique sur un point de l’axe ∆, le moment est nul, tout comme si la force est parallèle à l’axe.
Application 2 : Quel est le moment du poids d’une masse msitué à l’extrémité d’une balançoire
à bascule de longueur par rapport à l’axe de de rotation de celle-ci ?
3.2 Couple de forces
Définition. Considérons un solide Σsur lequel s’exerce un ensemble de forces #”
F(Mi)en divers points Mi
du solide. Si la somme des forces est nulle, cet ensemble de force constitue un couple.
On peut calculer le moment du couple par rapport à un axe ∆comme la somme des moments de chacune
des forces. On a
M∆=X
Mi∈Σ
(# ”
AMi∧#”
F(Mi)) ·#”
e∆.(3.2)
Ce moment, appelé aussi couple par abus de langage, est indépendant du point Aoù il est calculé.
Remarque : Les couples permettent la mise en rotation des systèmes. Si la somme des forces
s’appliquant sur le solide est non nulle, alors celle-ci correspond à la résultante des actions et
s’applique sur le centre de gravité du système. Résultante et moment du couple forment les
deux composantes du torseur des actions vu en SII.
Application 3 : Montrer que le couple des actions qu’exerce un opérateur pour débloquer une valve
vaut, avec les notations du schéma, M∆=−2F sin θ.
# ”
F1
# ”
F2
•
∆
θ
θ#”
e∆
3.3 La liaison pivot
Une liaison pivot d’axe ∆est une liaison qui restreint les possibilités de mouvement du solide à la seule
rotation autour de l’axe ∆.
On note #”
Fliaison les forces de liaison s’exerçant sur le solide. A priori, ces forces sont non nulles. Dans
le cas d’une liaison pivot parfaite, le couple des forces est supposé nul. Dans le cas de frottements solides,
un couple constant opposé au mouvement s’applique.
Remarque : Seuls les moments ou les composantes de moment dans la direction de l’axe ∆
sont utiles à l’étude du mouvement du solide ; les autres actions sont compensées par le bâti.
4/7

Mécanique 5 : Mouvement d’un solide en rotation autour d’un axe fixe Maxime Champion
4 Théorème du moment cinétique
Théorème. Plaçons nous dans le référentiel Rsupposé galiléen. Considérons un solide Σen rotation
autour d’un axe fixe ∆et de moment d’inertie J∆par rapport à cet axe. Notons θ(t)l’angle entre les axes
du solide et la position initiale de celui-ci et M∆l’ensemble des moments par rapport à l’axe ∆subis par
le solide. Dans ce cas, on la théorème du moment cinétique :
dL∆/R
dt=JƬ
θ(t) = M∆.(4.1)
La dérivée du moment cinétique du solide est égale au moment des forces.
On remarque immédiatement l’analogie de cette loi avec le principe fondamentale de la dynamique :
PFD m#”
p=m#”
v#”
a#”
F
TMC J∆L∆¨
θM∆
5 Exemple du pendule pesant
Considérons un pendule massif de masse totale Met de centre de gravité G. Il peut entrer en rotation
autour de l’axe ∆passant par le point Ocomme représenté figure 2. On note J∆son moment d’inertie par
rapport à l’axe ∆et la distance OG.
#”
e∆
×G
θ(t)
Fig. 2 – Le pendule pesant en rotation autour de l’axe ∆.
Expérience 1 : TP 24 - Étude du pendule pesant
Application 4 :
BMontrer que l’équation du mouvement s’écrit
JƬ
θ(t) = −mg sin θ(t).
BMontrer que ce pendule est équivalent à un oscillateur pour des petites oscillations.
BMontrer que la quantité 1
2J∆˙
θ(t)2−mg cos θ(t)
est constante au cours du mouvement. Il s’agit d’une intégrale première du mouvement.
ILe portrait de phase
À l’aide de l’intégrale première, on peut remarquer que tout se passe comme pour le pendule simple
avec une énergie potentielle de la forme Ep=mg(1 −cos θ(t)). Dans ce cas, on peut tracer le graphe de
l’énergie potentielle puis en déduire le portrait de phase ce qui est réalisé figure 3.
5/7
 6
7
6
7
1
/
7
100%