ÉNERGIE D`UN POINT MATÉRIEL

Q Énergie d’un point matériel (33-108) Page 1 sur 11 JN Beury
M
f
G
v
G
M
A
B
f
G
v
G
Γ
ÉNERGIE D’UN POINT MATÉRIEL
I. DÉFINITIONS QUALITATIVES
Un système possède de l’énergie s’il peut fournir du travail.
Exemple : point matériel soumis uniquement à la pesanteur. Il peut fournir du travail en modifiant sa position ou sa
vitesse.
Plus généralement : Un point matériel possède de l’énergie potentielle si du travail peut être fourni par modification de sa
position. Un point matériel possède de l’énergie cinétique si du travail peut être fourni par modification de sa vitesse.
II. PUISSANCE – TRAVAIL
II.1 Puissance d’une force
Soit M un point matériel de vitesse
()
vMℜ
G dans le référentiel
ℜ
. La puissance de la force
f
G à laquelle le point M est
soumis à un instant t est :
(
)
(
)
Pt f vM
ℜ
=⋅
G
G
• La puissance s’exprime en Watt (symbole W)
• La puissance dépend du référentiel. En effet,
(
)
vM
ℜ
G
dépend du référentiel et
f
G ne dépend pas du
référentiel.
II.2 Travail d’une force
a) Travail élémentaire
On note dl
JJG le déplacement élémentaire du point M pendant dt. On a vu que ddlvt=
J
JG
G
.
On note W
δ
le travail élémentaire de la force
f
G
pendant dt.
(
)
dWPtt
δ
=
• Le travail élémentaire s’exprime en Joule (symbole J)
• Le travail élémentaire dépend du référentiel.
On donne une autre expression du travail élémentaire :
(
)
dddWPttfvtfl
δ
=
=⋅ =⋅
G
G
J
JG
G
dWfl
δ
=
⋅
G
J
JG
Pour calculer dl
JJG, on utilisera les coordonnées cartésiennes, cylindriques, sphériques ou l’abscisse curviligne :
dd d d
x
yz
lxu yu zu=++
JJGGGG
; dd d d
rz
lruru zu
θ
θ
=+ +
JJGGGG
; dd d sind
r
lrurur u
θ
ϕ
θ
θϕ
=+ +
J
JG
G
GG
; dd
T
lsu=
JJGG
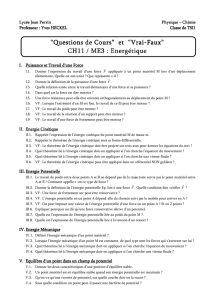
b) Travail le long d’un chemin de A vers B
Le point M se déplace de A vers B le long du chemin
Γ
. Pour calculer le travail de la force
f
G entre A (instant tA) et
B (instant tB), il faut faire la somme de tous les travaux élémentaires :
()
B
AB
A
WW
δ
→Γ=
∫
.

Q Énergie d’un point matériel (33-108) Page 2 sur 11 JN Beury
O
x
z
y
A
B
Γ
g
G
()
d
B
A
t
AB
t
Wfvt
→Γ=⋅
∫
G
G
()
d
B
AB
A
Wfl
→Γ
=
⋅
∫
G
J
JG
On va voir dans les exemples dans le paragraphe suivant que le travail d’une force dépend a priori du chemin suivi.
Il faut donc préciser le point de départ, le point d’arrivée et le chemin suivi.
III. EXEMPLES DE CALCULS DE TRAVAUX
III.1 Force de pesanteur terrestre ou poids d’un corps
On cherche à calculer le travail du poids entre A et B le long du chemin
Γ
.
1ère méthode : Calculer le travail élémentaire en choisissant une base de
projection convenable et intégrer.
coordonnées cartésiennes :
z
Pmg mgu==−
G
GG
et dd d d
x
yz
lxu yu zu=++
J
JG
G
GG
ddWPl mgz
δ
=⋅ =−
JJG
G
Il reste à intégrer entre A et B :
()
[]
()
dB
A
Bz
B
A
AB z
A
Wmgzmgzmgzz
→Γ=− =− =− −
∫
Interprétation physique :
• Le travail ne dépend pas du chemin suivi mais uniquement du point de départ A et du point d’arrivée B, on dit que
le poids est une force conservative.
• Si
A
B
zz>, on pose
A
B
hz z=−, 0Wmgh=>. Si le travail est positif, la force est motrice.
• Si
A
B
zz<, on pose '
B
A
hzz=− ; '0Wmgh=− < . Si le travail est négatif, la force est résistante.
2ème méthode : utilisation de l’énergie potentielle. Elle sera utilisée de façon systématique quand on connaît l’énergie
potentielle d’une force. Voir paragraphe sur l’énergie potentielle.
III.2 Oscillateur harmonique spatial
On considère une force :
f
kOM=−
GJJJJG. Le point M peut se déplacer dans tout l’espace. On utilisera les coordonnées
sphériques car on peut projeter facilement cette force dans la base des coordonnées sphériques :
r
f
kOM kru=− =−
GJJJJGG ; dd d sind
r
lrurur u
θ
ϕ
θ
θϕ
=+ +
JJGGG G
On en déduit : ddWfl krr
δ
=⋅=−
GJJG
Le travail de la force entre A et B le long d’un chemin
Γ
est :
()
()
22
1
d2
B
BA
AB A
Wkrrkrr
→Γ=− =− −
∫
Le travail ne dépend pas du chemin suivi mais uniquement du point de départ A et du point d’arrivée B, c’est une force
conservative.
III.3 Force de frottement fluide
Une force de frottement est toujours opposée à la vitesse. La force de frottement fluide est proportionnelle à la vitesse.
On a alors :
f
v
λ
=−
GG.
On considère deux chemins :
• chemin 1
Γ :
A
BA→→.
()
1dd0
BC
AB
tt
ABCA tt
Wvvtvvt
λλ
→→= Γ
=
−⋅ − ⋅ <
∫∫
G
GGG
car 20vv v
⋅
=>
G
G
• chemin 1
Γ :
A
A→.
()
20
AA
W→Γ = Pas de déplacement du point M.
Le travail dépend du chemin suivi, c’est une force non conservative.
Toutes les forces de frottement sont résistantes, les travaux sont donc négatifs. Ce sont des forces non
conservatives.

Q Énergie d’un point matériel (33-108) Page 3 sur 11 JN Beury
M
A
B
T
u
G
Γ
0T
f
fu=−
G
G
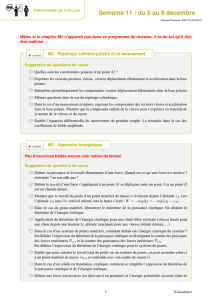
III.4 Force de frottement solide
Cette force est plus délicate à manipuler que la force de frottement fluide car sa norme est constante mais sa direction
change au cours du temps et elle n’a pas d’expression simple dans les bases utilisées usuellement : coordonnées
cartésiennes, cylindriques et sphériques.
On va la projeter suivant le vecteur unitaire T
u
G (voir chapitre sur la vitesse) : 0T
f
fu=−
G
G
avec f0 = cte
0T
f
fu=−
GG ; dd
T
lsu=
JJGG
Le travail élémentaire vaut : 0
ddWfl fs
δ
=⋅=−
GJJG.
Le travail de A à B le long du chemin Γ vaut :
Force de frottement solide :
()
(
)
0BA
AB
Wfss
→Γ=− −
Interprétation physique :
• Le travail dépend du chemin suivi, ce n’est pas une force conservative.
• Le signe – s’interprète puisque la force de frottement est résistante.
• s désigne l’abscisse curviligne.
p
BA
s
sAB−= représente la distance parcourue par le point M entre A et B.
IV. FORCES CONSERVATIVES – ÉNERGIE POTENTIELLE
IV.1 Définition d’une force conservative
Une force
f
Gest conservative si le travail de la force ne dépend pas du chemin suivi mais uniquement du point de
départ A et du point d’arrivée B.
On appelle champ de force
()
fr
GG l’ensemble des forces
(
)
fM
G
en tous les points d’un certain domaine de l’espace.
Un champ de force défini dans un certain domaine de l’espace est dit conservatif si son travail est indépendant du chemin
suivi, quel que soit le déplacement envisage dans le domaine de définition.
Pour un parcours fermé A = B, on a alors 0W
=
pour une force conservative. Il suffit d’imaginer un déplacement de
longueur nulle…
Pour une force conservative, quelque soit le chemin fermé, d0Wfl
=
⋅=
∫
G
J
JG
v
Le symbole « rond » dans l’intégrale rappelle que le chemin est fermé.
IV.2 Énergie potentielle d’un point matériel
a) Première définition
On dit qu’un champ de force permanent (c'est-à-dire indépendant du temps) dérive d’une énergie potentielle Ep
si et seulement si il existe une fonction Ep telle que pour tout déplacement élémentaire dl
JJG, on peut écrire :
d
p
WE
δ
=
− (eq.1)
b) Deuxième définition équivalente
Au lieu de considérer un déplacement élémentaire dl
J
JG , on considère un déplacement entre A et B. Il suffit d’intégrer
la relation précédente entre A et B le long d’un chemin
Γ
:
()
() ()
()
d
BB B
pp p p
AB A
AA
WWEEEBEA
δ
→Γ
==−=− =− −
∫∫ .
On a donc une deuxième relation équivalente à la précédente :
(
)
(
)
(
)
AB p p p
WEEBEA
→=−∆ =− − (eq.2)

Q Énergie d’un point matériel (33-108) Page 4 sur 11 JN Beury
z
g
G
O
M
r
r
u
G
f
G
Interprétation physique pour une force qui dérive d’une énergie potentielle :
• La force
f
G est conservative, puisque son travail ne dépend que du point de départ et du point d’arrivée.
• L’énergie potentielle est définie à une constante additive près puisque sa définition ne fait intervenir
que la différentielle de Ep ou la variation de Ep.
• Attention aux notations : W
δ
est une notation dans le cas général qui signifie simplement « petit travail »
ou travail élémentaire. On l’appelle forme différentielle, ce qui signifie plus simplement que le travail
dépend a priori du chemin suivi. Si la force dérive d’une énergie potentielle, on remplace W
δ
par dEp qui
est une différentielle exacte. On peut intégrer d
p
E
∫
, c’est Ep à une constante près. Le symbole
p
E
∆
signifie variation d’énergie potentielle.
• On utilisera beaucoup l’équation (2) pour calculer le travail d’une force dont on connaît l’énergie
potentielle (voir paragraphe suivant)
c) Relation entre la force et le gradient de l’énergie potentielle
• Définition de l’énergie potentielle : dd
p
Wfl E
δ
=⋅=−
G
J
JG
• Définition du gradient de Ep : dgradd
pp
EEl=⋅
JJJJG JJG
On a donc : grad d d
p
El fl⋅=−⋅
G
JJJJG JJGJJG, soit
()
grad d 0
p
fEl+⋅=
G
J
JJJG JJG.
Cette relation doit être vérifiée pour tout déplacement dl
J
JG . On doit donc avoir grad 0
p
fE
+
=
G
J
JJJG G (voir chapitre sur le
produit scalaire et sur le gradient).
grad
p
fE=−
G
J
JJJG (eq .3)
On utilisera pour l’instant cette formule en coordonnées cartésiennes : ppp
x
yz
EEE
fuuu
x
yz
∂∂∂
=− − −
∂∂∂
G
G
GG
.
Les trois relations (eq.1), (eq.2) et (eq.3) sont équivalentes et concernent donc une force qui dérive d’une énergie
potentielle.
On emploie le terme « dérive d’une énergie potentielle » puisque fx est reliée à la dérivée partielle de Ep par rapport
à x.
IV.3 Comment calculer une énergie potentielle ?
a) Méthode
Pour calculer une énergie potentielle, on se contentera de la méthode simplifiée suivante :
• Calculer le travail élémentaire de la force avec un système de coordonnées bien choisi.
• Si on peut trouver une primitive, alors la force dérive d’une énergie potentielle et il suffit d’utiliser :
d
p
WE
δ
=−
b) Force de pesanteur
Coordonnées cartésiennes :
z
Pmg mgu==−
GGG
; dd d d
x
yz
lxu yu zu=++
J
JG
G
GG
dWmgz
δ
=− . On peut identifier d
p
WE
δ
=−
et p
Emgzcte=+
L’énergie potentielle de la force de pesanteur est p
Emgzcte
=
+.
Attention aux signes :
g
G
est dirigé vers les bas et z vers le haut. On choisit où on
veut l’origine des énergies potentielles.
c) Force de gravitation
On considère un point matériel M de masse m placé dans le champ de gravitation créé par
une masse m’ située en O. On choisit le point O comme origine des coordonnées
sphériques : 2
'
r
Gmm
fu
r
=−
G
G
; dd d sind
r
lrurur u
θ
ϕ
θ
θ
ϕ
=+ +
JJGGG G
2
'd
Gmm
Wr
r
δ
=− . On a : 2
'
dd
p
Gmm
EW r
r
δ
=− = et '
p
Gmm
Ecte
r
−
=+
.
On choisit toujours la constante nulle de façon à avoir
(
)
0
p
E
∞
=.
L’énergie potentielle de la force de gravitation est '
p
Gmm
Er
−
=. On choisit toujours la constante nulle.

Q Énergie d’un point matériel (33-108) Page 5 sur 11 JN Beury
O
M
r
r
u
G
f
G
O
M
r
r
u
G
f
G
O
M
r
r
u
G
f
G
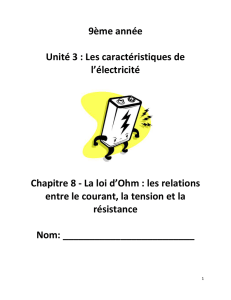
d) Force de Coulomb
On considère une charge ponctuelle située en M de charge Q placé dans le champ
électrostatique créé par une charge ponctuelle q située en O. On choisit le point O comme
origine des coordonnées sphériques : 2
0
'
4r
qq
fu
r
πε
=
G
G
; dd d sind
r
lrurur u
θ
ϕ
θ
θ
ϕ
=+ +
J
JG
G
GG
2
0
'd
4
qq
Wr
r
δπε
=. On a : 2
0
'
dd
4
p
qq
EW r
r
δπε
=− =− et
0
'
4
p
qq
Ecte
r
πε
=+.
On choisit toujours la constante nulle de façon à avoir
(
)
0
p
E
∞
=.
Sur le schéma, la force est attractive : les charges sont de signe opposé.
L’énergie potentielle de la force de Coulomb est
0
'
4
p
qq
Er
π
ε
=. On choisit toujours la constante nulle.
e) Force exercée par un ressort
¾ Mouvement dans un plan horizontal : supposons que la force exercée par un ressort se mette sous la forme :
x
f
kxu=−
GG ; dd
x
lxu=
JJG
G
. dWkxx
δ
=− . On peut identifier d
p
WE
δ
=
− et et 2
1
2
p
Ekxcte=+
¾ Généralisation : coordonnées sphériques :
(
)
0r
fkrlu=− −
G
G
On appelle r la longueur du ressort et l0 la longueur à vide.
On envisage un déplacement élémentaire dans l’espace : dd d sind
r
lrurur u
θ
ϕ
θ
θ
ϕ
=+ +
J
JG
G
GG
()
0dWkrlr
δ
=− − , soit
(
)
0
dd
p
EWkrlr
δ
=− = − . On a :
()
2
0
1
2
p
Ekrlcte=−+
L’énergie potentielle de la force exercée par un ressort est
()
2
0
1
2
p
Ekllcte=−+.
l désigne la longueur du ressort à un instant t et l0 la longueur à vide du ressort.
V. COMMENT CALCULER LE TRAVAIL D’UNE FORCE ?
On rencontre trois cas dans les problèmes :
V.1 Force conservative de travail nul
Exemple : réaction d’un support lorsqu’il n’y a pas de frottement.
La réaction R
Gest orthogonale au petit déplacement dl
J
JG , donc d0Wfl
δ
=
⋅=
G
J
JG et W = 0
V.2 Force conservative qui dérive d’une énergie potentielle
Il est inutile de calculer le travail élémentaire et d’intégrer. Il est beaucoup plus simple d’utiliser l’énergie potentielle :
(
)
(
)
(
)
AB p p p
WEEBEA
→=−∆ =− −
Exemple : force de pesanteur, force de gravitation, force de Coulomb, force exercée par un ressort…
Le travail du poids quand le point M se déplace de A vers B vaut :
()
AB p B A
WEmgzmgz
→=−∆ =− − .
V.3 Autres cas : forces non conservatives
Il faut dans ce cas calculer le travail élémentaire d0Wfl
δ
=
⋅=
G
J
JG et intégrer sur le chemin suivi par le point M.
VI. QUELLE RELATION ENTRE FORCE DE GRAVITATION ET POIDS ?
On verra dans le cours que le poids comprend un terme gravitationnel et un terme centrifuge. Le terme
gravitationnel est prépondérant.
Soit la terre de centre O et de masse MT. On considère un point M à la surface de la terre de masse m.
• La force de gravitation exercée par la terre sur le point M est : 2
T
r
GM m
fu
r
=−
G
G
En première approximation, le poids est égal à la force de gravitation : 2
T
r
GM m
Pmg u
r
=≈−
G
G
G.
Le champ de pesanteur terrestre vaut : 2
T
r
GM
g
u
r
≈−
GG
.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%