Réseaux linéaires en régime permanent sinuso¨ıdal

Chapitre 8
R´eseaux lin´eaires en r´egime
permanent sinuso¨ıdal
8.1 Les signaux sinuso¨ıdaux
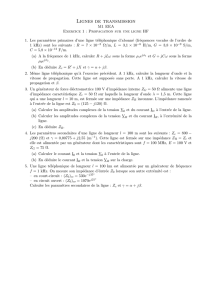
Rappelons qu’un signal F(t) est sinuso¨ıdal si son ´evolution dans le temps est d´ecrite par une
fonction sinuso¨ıdale du type
F(t) = Acos(ωt +θ)
Ses param`etres sont les suivants :
♣sa pulsation ω;
♣son amplitude maximum A;
♣sa phase θ.
Les ´evolutions de ce signal se r´ep`etent p´eriodiquement dans le temps. En effet, les deux valeurs
F(t+2π
ω) et F(t) sont ´egales. La quantit´e T=2π
ω, homog`ene `a un temps, est la p´eriode de
r´ep´etition du signal. Le nombre de p´eriodes effectu´ees par unit´e de temps, soit f= 1/T est la
fr´equence de r´ep´etition du signal. Ce nombre est homog`ene `a l’inverse d’un temps et s’exprime en
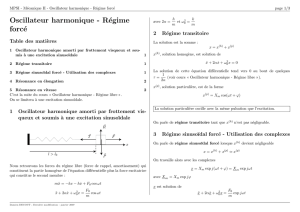
Hertz. Si par exemple f= 50 Hz, cela signifie que le signal effectue 50 p´eriodes (ou oscillations)
pendant 1 seconde. Une repr´esentation en est donn´ee `a la figure 8.1.
Figure 8.1 – Repr´esentation d’un signal sinuso¨ıdal
Bien sˆur, un signal sinuso¨ıdal pur qui ´evolue ´eternellement comme une fonction sinuso¨ıdale du
temps ne peut qu’ˆetre un signal id´eal, une abstraction, car tous les signaux r´eels ont un d´ebut et
une fin. N´eanmoins, on peut utiliser ce mod`ele pour d´ecrire avec une bonne approximation bon
123

Chapitre 8. R´eseaux lin´eaires en r´egime permanent sinuso¨ıdal
nombre de signaux ayant des variations quasi-sinuso¨ıdales pendant un laps de temps suffisamment
long.
*Pourquoi, dans les r´egimes variables dans le temps, parle-t-on le plus souvent des signaux
sinuso¨ıdaux ? Qu’est-ce qui justifie leur importance ? Il y a tout d’abord une r´eponse pratique
imm´ediate : on sait fabriquer des g´en´erateurs de tensions variables, tels que les alternateurs
industriels, qui d´elivrent des tensions quasi-sinuso¨ıdales ; de mˆeme, les ondes porteuses utilis´ees
dans les transmissions sont de nature quasi-sinuso¨ıdale. Mais il y a aussi une raison th´eorique
profonde qui rend incontournable l’´etude des r´egimes sinuso¨ıdaux. Elle fut ´etablie par Fourier.
Nous ferons seulement ´etat du r´esultat essentiel, sans y mˆeler la rigueur math´ematique qui ne
serait pas de mise dans ce cours.
Soit F(t) un signal quelconque. Ce peut ˆetre aussi bien une tension variable appliqu´ee aux bornes
d’un circuit ´electrique, qu’une onde radio ou une onde acoustique. D’apr`es la th´eorie de Fourier, ce
signal peut ˆetre envisag´e comme une superposition de signaux sinuso¨ıdaux de diverses pulsations,
selon une relation du type suivant
F(t) = X
ωF(ω) exp(jωt),avec j= +√−1
Le plus souvent, cette somme est plutˆot une somme continue, c’est-`a-dire une int´egrale, et l’on
parle alors d’int´egrale de Fourier
F(t) = Z+∞
−∞ F(ω) exp(jωt)dω (8.1)
L’amplitude complexe (au sens des nombres complexes !) F(ω) que l’on appelle aussi amplitude
spectrale, d´efinit le poids selon lequel le signal sinuso¨ıdal ´el´ementaire exp(jωt) intervient dans la
somme ci-dessus. Plus pr´ecis´ement, son module |F(ω)|est ce qu’on appelle le spectre en pulsation
de F(t). Si l’on connait, pour toutes les fr´equences (ou pulsations), la r´epartition en fr´equence,
c’est-`a-dire la fonction F(ω), alors, la formule ci-dessus permet en principe de reconstruire le
signal F(t) par une recombinaison ad´equate de signaux sinuso¨ıdaux. Inversement, si l’on connait
le signal F(t) pour toutes les dates courant de −∞ `a +∞, on peut d´eduire l’amplitude spectrale
associ´ee `a ce signal au moyen de l’inversion de Fourier
F(ω) = 1
2πZ+∞
−∞
F(t) exp(−jωt)dt (8.2)
Ces relations s’interpr`etent en disant que l’ensemble des fonctions telles que F(t) forme un espace
vectoriel complexe pour lequel les fonctions exp(jωt), o`u ωcourt de −∞ `a +∞, constituent une
base. Un vecteur quelconque F(t) de cet espace vectoriel peut ˆetre d´evelopp´e suivant cette base
au moyen de l’int´egrale de Fourier, et la fonction F(ω) apparaˆıt alors comme la composante de
F(t) sur exp(jωt), obtenue par un produit scalaire d´efini par la formule inverse de Fourier 1. On
´etablit ´egalement la relation de Parseval
Z+∞
−∞ |F(t)|2dt = 2πZ+∞
−∞ |F(ω)|2dω (8.3)
qui est en fait une identit´e sur la norme de F: le membre de gauche est une d´efinition de
cette norme et le membre de droite indique que cette norme peut s’exprimer comme la “somme”
(int´egrale) des carr´es des composantes sur la base des fonctions exp(jωt) (au facteur 2πpr`es). Elle
s’interpr`ete en termes ´energ´etiques : l’´energie transport´ee par un signal ´etant proportionnelle au
carr´e de son amplitude, le membre de droite repr´esente l’´energie totale transport´ee par le signal
F(t), qui doit ˆetre ´egale `a la somme des ´energies transport´ees par ses composantes.
On notera que la repr´esentation de Fourier d’un signal force d´ej`a l’utilisation de la notation
complexe ejωt pour repr´esenter un signal sinuso¨ıdal. Comme nous le verrons dans la suite, elle
s’av`ere en fait incontournable dans l’´etude des circuits lin´eaires en r´egime permanent sinuso¨ıdal.
1. Voir le compl´ement I.
Christian Carimalo 124 Cours d’Electrocin´etique ´el´ementaire

Chapitre 8. R´eseaux lin´eaires en r´egime permanent sinuso¨ıdal
Donnons encore quelques d´efinitions utiles pour la suite. La valeur moyenne temporelle d’une
grandeur fonction du temps G(t) dans l’intervalle t0−(∆t)/2≤t≤t0+ (∆t)/2 est d´efinie par
l’int´egrale
< G > =1
∆tZt0+∆t/2
t0−∆t/2
G(t)dt (8.4)
Elle d´epend a priori de t0. Cependant, si G(t) est p´eriodique de p´eriode T, l’op´eration 8.4 revient
`a faire la moyenne de G(t) sur une p´eriode et donne un r´esultat ind´ependant de t0:
< G > =1
TZT
0
G(t)dt (8.5)
Si G(t) = G0cos(ωt +θ), on a bien sˆur < G >= 0 car 2
ZT
0
cos ωt dt =ZT
0
sin ωt dt = 0
En revanche la moyenne de G2n’est pas nulle. En effet, ´ecrivant
cos2(ωt +θ) = 1
2[1 + cos 2(ωt +θ) ]
et notant que 3
ZT
0
cos 2(ωt +θ)dt = 0
il vient
< G2>=G2
eff ,avec Geff =G0
√2(8.6)
ce qui d´efinit la valeur efficace Geff de G.
8.2 D´efinition des r´eseaux lin´eaires
L’application des lois usuelles de l’Electricit´e en ARQS : lois de Kirchhoff (loi des mailles, loi
des noeuds), loi d’Ohm, loi de Faraday, `a des circuits comportant des r´esistances, des condensa-
teurs, des bobines, conduit `a des ´equations d’´evolution portant sur une intensit´e, une charge de
condensateur ou une tension quelconque, prenant la forme d’´equations diff´erentielles du type
D(F) = S(8.7)
o`u
D=
n
X
r=0
ar
dr
dtr(8.8)
est un op´erateur diff´erentiel portant sur la grandeur F´etudi´ee et Sun second membre qui
s’exprime en fonction des diverses fem Emintervenant dans le circuit envisag´e sous la forme
g´en´erale :
2. Ecrire cos(ωt +θ) = cos ωt cos θ−sin ωt sin θ.
3. On peut aussi remarquer que cos2(ωt +θ) et sin2(ωt +θ) prenant le mˆeme ensemble de valeurs sur une
p´eriode, on a <cos2>=<sin2>=1
2<cos2+ sin2>=1
2.
Christian Carimalo 125 Cours d’Electrocin´etique ´el´ementaire

Chapitre 8. R´eseaux lin´eaires en r´egime permanent sinuso¨ıdal
S=
N
X
m
qm
X
k=0
bm,k
dkEm
dtk(8.9)
Les coefficients ar(r= 0, ..., n) et bm,k (k= 0, ..., qm;m= 1, ..., N) sont des constantes r´elles qui
s’expriment au moyen des param`etres caract´erisant le circuit (r´esistances, capacit´es, coefficients
d’auto-induction).
La propri´et´e de ces ´equations, certes ´evidente, mais n´eanmoins fondamentale, est qu’elles sont
lin´eaires 4. En effet, l’op´erateur de d´erivation est lui-mˆeme lin´eaire en ce sens que, quelles que
soient les deux fonctions F1(t) et F2(t), et quels que soient les deux nombres complexes constants
µ1et µ2, on a
d
dt {µ1F1+µ2F2}=µ1
dF1
dt +µ2
dF2
dt (8.10)
d’o`u l’on d´eduit, d’une part, que
D(µ1F1+µ2F2) = µ1D(F1) + µ2D(F2) (8.11)
et, d’autre part que, consid´erant deux suites de fem E(1)
met E(2)
m(m= 1, ..., N) et deux nombres
complexes constants γ1et γ2, on a
Snγ1E(1)
m+γ2E(2)
mo=γ1SnE(1)
mo+γ2SnE(2)
mo (8.12)
On en d´eduit notamment que si F1et F2sont les solutions g´en´erales de l’´equation 8.7 avec pour
seconds membres respectifs SnE(1)
moet SnE(2)
mo, la solution g´en´erale de l’´equation ayant
pour second membre Snγ1E(1)
m+γ2E(2)
moest γ1F1+γ2F2. La notion de lin´earit´e d’un r´eseau,
d´ej`a rencontr´ee lors de l’´etude des r´egimes permanents continus, sera ainsi g´en´eralis´ee au cas des
r´egimes variables de la fa¸con suivante.
Un r´eseau est dit lin´eaire et invariant dans le temps si toute grandeur (intensit´e, tension)
caract´erisant son ´etat ´electrique est li´e aux fem sources Empar une ´equation diff´erentielle telle
que 8.7 avec des coefficients constants 5−6.
Cette d´efinition inclut aussi bien les r´egimes continus. La lin´earit´e d’un r´eseau s’exprime le plus
simplement et de la fa¸con la plus spectaculaire sur les composantes sinuso¨ıdales des signaux,
telles que donn´ees par la transformation de Fourier d´efinie par 8.1 et 8.2. En effet, les signaux
ejωt ´etant ind´ependants les uns des autres, si F(t) satisfait 8.7, chacune de ses composantes doit
aussi la v´erifier. Or, appliqu´ee sur la fonction ejωt, une d´erivation temporelle revient `a une simple
multiplication par jω. La cons´equence est que, pour chaque composante sinuso¨ıdale, la relation
diff´erentielle 8.7 devient une relation alg´ebrique :
D(F(ω)ejωt) = P(p)F(ω)ejωt =ejωt
N
X
mBm(p)Em(ω) (8.13)
o`u P(p) et Bm(p) sont des polynˆomes de la variable p=jω :
P(p) =
n
X
r=0
arpr,Bm(p) =
qm
X
k=0
bm,k pk(8.14)
4. Ce qui refl`ete le fait plus g´en´eral que les ´equations de l’Electromagn´etisme sont lin´eaires.
5. Certaines sources peuvent ˆetre en fait des sources de courant.
6. La notion d’invariance dans le temps est li´ee `a la constance des coefficients de l’´equation et ne sera plus
mentionn´ee dans la suite.
Christian Carimalo 126 Cours d’Electrocin´etique ´el´ementaire

Chapitre 8. R´eseaux lin´eaires en r´egime permanent sinuso¨ıdal
et Em(ω)ejωt la composante sinuso¨ıdale de Em(t) correspondant `a la pulsation ω. Apr`es simpli-
fication par le facteur commun ejωt on obtient ainsi
F(ω) = 1
P(p)
N
X
mBm(p)Em(ω) (8.15)
A supposer que F(t) soit la grandeur int´eressante sur le plan pratique, et qui pour cette raison sera
appel´ee grandeur de sortie, les fractions rationnelles Bm(p)/P(p) d´ecrivent la r´eponse fr´equentielle
du circuit en retour de signaux d’entr´ee, repr´esent´es ici par les fem Em(ω). Elle sont ind´ependantes
de ces derni`eres : ce sont des caract´eristiques du circuit. A l’aide de ces quantit´es, on peut alors, en
principe, en combinant 8.15 et 8.1, reconstruire la solution F(t) r´esultant des excitations Em(t).
*La transformation de l’´equation diff´erentielle 8.7 en relation alg´ebrique 8.15 montre tout
l’int´erˆet qu’il y a, d’une part, `a consid´erer d’embl´ee la r´eponse d’un circuit lin´eaire `a une excitation
sinuso¨ıdale, et, d’autre part, `a repr´esenter cette derni`ere par la notation complexe ejωt, comme
l’incite la transformation de Fourier. Une repr´esentation r´eelle telle que X(t) = Acos(ωt +θ),
bien que correspondant au signal observ´e qui, lui, est n´ecessairement r´eel, compliquerait en fait
les calculs. En effet, une d´erivation temporelle la transforme en Y(t) = −ω A sin(ωt +θ) qui est
une fonction ind´ependante d’elle, tandis que le r´esultat de cette op´eration sur la fonction ejωt
revient simplement `a multiplier celle-ci par jω, donnant une fonction ayant la mˆeme d´ependance
temporelle. De mˆeme, l’int´egration d’un cosinus le transforme en un sinus, alors qu’elle revient `a
diviser ejωt par jω. Il en r´esulte que, dans une ´equation ´electrique donn´ee o`u peuvent intervenir
`a la fois des d´erivations et des int´egrations (une charge est l’int´egrale d’une intensit´e), lesdites
op´erations deviennent purement alg´ebriques (multiplication, division) lorsqu’elles sont appliqu´ees
`a ejωt, ce qui ne peut ˆetre r´ealis´e avec la repr´esentation r´eelle X(t). En outre, ´etant commun `a
tous les termes de l’´equation, le facteur ejωt peut en ˆetre imm´ediatement extrait, ce qui conduit `a
une ´equation, certes complexe (au sens des nombres complexes), mais alg´ebrique avec des termes
ind´ependants du temps, ce qui repr´esente un gain consid´erable de simplification 7.
Pr´ecisons ici ce passage de la notation r´eelle `a la notation complexe pour un r´egime permanent
sinuso¨ıdal :
X(t) = Acos(ωt +θ)→x(t) = Aejθ ejωt ,donc X(t) = <(x(t)) (8.16)
Cherchons une solution r´eelle sinuso¨ıdale X(t) de l’´equation 8.7 avec des fem sinuso¨ıdales r´eelles
Em(t) = E0mcos(ωt +θm) :
D(Acos(ωt +θ)) = S({E0mcos(ωt +θm)}) (8.17)
Les coefficients de l’´equation ´etant constants, une d´erivation temporelle des deux membres de
l’´equation ou aussi bien le changement ωt →ωt +π/2 conduisent `a cette autre ´equation
D(Asin(ωt +θ)) = S({E0msin(ωt +θm)}) (8.18)
Comme les op´erateurs Det Ssont lin´eaires, l’addition de 8.17 et de 8.18 que l’on a pr´ealablement
multipli´ee par jdonne
D(Aejθejωt) = SE0mejθmejωt=D(x(t)) (8.19)
La fonction x(t) satisfait donc 8.7 o`u le second membre est exprim´e au moyen des repr´esentations
complexes des fem. On obtient alors imm´ediatement
x(t) = ejωt 1
P(p)
N
X
mBm(p)E0mejθm(8.20)
7. Afin de ne pas alourdir inutilement l’expos´e, nous ne d´ecrirons pas ici la repr´esentation de Fresnel des
tensions et des intensit´es qui fut supplant´ee en simplicit´e par la repr´esentation complexe.
Christian Carimalo 127 Cours d’Electrocin´etique ´el´ementaire
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
1
/
47
100%