Traitement du Signal - Signaux aléatoires : définitions

Traitement du Signal
Signaux aléatoires : définitions, exemples, propriétés
3 novembre 2014
Nancy Bertin - nancy.b[email protected]

Intro Définitions Stationnarité Pause DSP Exemples
Introduction
Parmi les différentes catégorisations des signaux, nous avons
évoqué la distinction entre signaux déterministes et aléatoires.
Cette catégorie a trait à la prédictibilité et la reproductibilité
d’un signal.
Les signaux déterministes peuvent être prédits de manière
certaine à tout instant, avec une description mathématique
simple et explicite.
Les signaux aléatoires sont “moins” prévisibles et issus de
processus qui, si on tente de les reproduire à l’identique,
produisent un autre signal.
Ces deux types de signaux appellent des outils de modélisation
différents : fonctions et suites explicites dans un cas, processus
aléatoires et modèles probabilistes dans l’autre.
2 M1 RI Traitement du Signal 03/11/2014

Intro Définitions Stationnarité Pause DSP Exemples
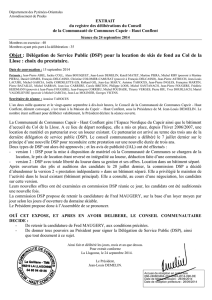
Illustration
Signal déterministe Signal aléatoire
0 50 100 150 200 250
−1.5
−1
−0.5
0
0.5
1
1.5
Temps (secondes)
Amplitude du signal
0 50 100 150 200 250
−1.5
−1
−0.5
0
0.5
1
1.5
Temps (secondes)
Amplitude du signal
x(t) = sin(2πft −π/4) x(t)∼ N(0, σ2)
3 M1 RI Traitement du Signal 03/11/2014

Intro Définitions Stationnarité Pause DSP Exemples
Dans la vraie vie
La plupart des signaux captés dans le monde physique ne sont pas
purement déterministes :
Certains signaux sont aléatoires par nature, issus de processus
complexes (cours de la bourse, voix humaine...)
Même issus d’un processus déterministe, les signaux captés
sont généralement modifiés par une composante aléatoire
(défauts des composants, bruit thermique...)
0 50 100 150 200 250
−1.5
−1
−0.5
0
0.5
1
1.5
Temps (secondes)
Amplitude du signal
0 50 100 150 200 250
−1.5
−1
−0.5
0
0.5
1
1.5
Temps (secondes)
Amplitude du signal
⇒besoin de modèles probabilistes et d’outils statistiques
4 M1 RI Traitement du Signal 03/11/2014

 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
1
/
47
100%