Composantes et applications électriques du système ferroviaire

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5 510 − 1
Composantes et applications
électriques du système ferroviaire
par Pierre CHAPAS
Senior Expert (honoraire)
ALSTOM Transport
e transport ferroviaire participe à la vie économique et industrielle depuis
près de deux siècles (encadré A) dans la plupart des pays (cf. tableau 6,
page 14). Après avoir été le seul moyen de transport terrestre de masse pendant
près d’un siècle, sa physionomie évolue très profondément. L’électricité a été
et est toujours l’un des arguments majeurs de ce développement par les atouts
déterminants qu’elle procure au chemin de fer :
— en termes de rendement énergétique, il se classe au tout premier rang de
par sa conception même : l’énergie de frottement au contact roue rail est le plus
faible et la traction électrique renforce encore ce bilan ;
— par rapport à l’environnement, il respecte – grâce à l’emploi de l’énergie
électrique – une parfaite intégration, que ce soit en site urbain ou sur ligne à
grande distance.
1. Composantes du système ferroviaire ................................................ D 5 510 - 2
2. Technologie de base « roue – rail » .................................................... — 3
3. Infrastructure............................................................................................ — 3
3.1 Plate-forme et ballast .................................................................................. — 3
3.2 Rail et traverses ........................................................................................... — 3
3.3 Contraintes électriques de la voie.............................................................. — 4
4. Matériel roulant........................................................................................ — 4
4.1 Matériel remorqué....................................................................................... — 4
4.2 Matériel moteur ........................................................................................... — 5
4.3 Configuration des trains.............................................................................. — 5
5. Énergie ........................................................................................................ — 5
5.1 Énergie de traction ...................................................................................... — 5
5.2 Énergie auxiliaire......................................................................................... — 6
6. Traction autonome. Production d’électricité................................... — 6
7. Traction électrique .................................................................................. — 6
7.1 Systèmes d’alimentation de traction ......................................................... — 6
7.2 Distribution d’électricité en ligne ............................................................... — 8
7.2.1 Conducteur aérien – système caténaire............................................ — 8
7.2.2 Conducteur au sol............................................................................... — 11
8. Sécurité et signalisation........................................................................ — 11
8.1 Signalisation par circuits de voie ............................................................... — 11
8.2 Transmission des informations de signalisation ...................................... — 12
8.3 Postes d’aiguillage....................................................................................... — 13
9. Conclusion ................................................................................................. — 13
Références bibliographiques ......................................................................... — 16
L

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
COMPOSANTES ET APPLICATIONS ÉLECTRIQUES DU SYSTÈME FERROVIAIRE ______________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5 510 − 2© Techniques de l’Ingénieur, traité Génie électrique
Il est intéressant, dans ce cadre, d’analyser les principales composantes – ou
vecteurs – de ce qu’il faut appeler le « système ferroviaire ». Cette approche est tout
à fait transposable à tout autre système de transport : aérien, maritime ou routier.
Chacune de ses composantes utilise les applications de l’électricité ; c’est
l’analyse que se propose le présent article, après avoir donné quelques repères
historiques.
Parallèlement, tous les aspects du chemin de fer bénéficient de l’électricité :
la climatisation des voitures, la signalisation lumineuse, la motorisation des
aiguillages, etc.
L’évolution des transports est telle que la concurrence s’exerce à tous les
niveaux. Dans ce cadre les atouts et les handicaps de chacun sont déterminants.
Après une situation de monopole pour le transport des passagers comme celui
du fret, jusque dans les années 1960, le chemin de fer se place dans les créneaux
correspondant à ses points forts :
— la grande vitesse s’est développée en Europe, aux États-Unis et est à l’état
de projets en Asie et en Australie ;
— les transports urbains sous la forme de métros, réseaux suburbains, tram-
ways, permettent la décongestion des villes et l’atténuation de la saturation des
infrastructures et des pollutions atmosphériques engendrées par l’automobile ;
— le transport du fret entre dans la complémentarité des systèmes de trans-
port et évite les risques subis par les transports routiers, en termes de saturation,
de sécurité et de pollution.
Ces trois axes majeurs font appel aux technologies électrotechniques et
électroniques ; en effet, les impératifs de rentabilité mettent en jeu les aspects
énergétiques et de développement durable.
Le lecteur consultera utilement, en particulier, les articles suivants, dans ce traité :
— Traction électrique ferroviaire – Dynamique ferroviaire et sous-stations [D 5 501] ;
— Installations électriques du Tunnel sous la Manche [D 5 055].
Enfin, pour en savoir plus, le lecteur se reportera aux références [1] [2] et [3].
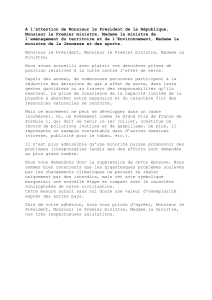
1. Composantes
du système ferroviaire
Tous les moyens de transport se composent de différents vec-
teurs de sorte que l’approche système s’applique et permet son
étude en intégrant l’ensemble des interfaces. Ainsi distingue-
rons-nous sept vecteurs fondamentaux du système ferroviaire,
représentés en figure 1.
Figure 1 – Les composantes du système ferroviaire
Matériel
roulant
Trafic
Clients
Matériel
remorque Matériel
moteur
Infrastructures
- Plate-forme
- Voies
- Ouvrages d'art
Exploitation
- Horaires
- Régulation
Énergie
- Combustible
- Énergie
Sécurité
- Signalisation
- Réglementation
Frêt
Passagers
Encadré A – Quelques repères du développement ferroviaire
Depuis son invention, la roue crée une ornière sur le terrain dès
lors que celui-ci est meuble. Les Romains ont, pour éviter cet
inconvénient, empierre leurs « voies ». Au XVIe siècle, dans les
mines d’Angleterre et d’Alsace, apparaissent des chemins de rou-
lement, en bois puis en fer, facilitant le roulement des wagonnets
poussés ou tirés par des hommes ou des chevaux. Les roues se
perfectionnèrent à l’aide d’un mentonnet puis d’un « boudin » de
guidage : le chemin de fer était né. Il faut attendre la domestication
de l’énergie autre qu’humaine ou animale, avec la vapeur, pour
voir les premières « locomotives » apparaîtrent avec Trevithick,
Stephenson (1804), puis Marc Seguin (1831).
La première application de l’électricité au chemin de fer coïncide
avec son développement dans les domaines industriel et
domestique : éclairage et force motrice. En 1879, Siemens met en
œuvre la première « locomotive » mue par un moteur de 4 kW
calqué sur le modèle de Gramme. Tandis que la vapeur conquiert
le domaine de la « grande traction », l’électricité investit les trans-
ports urbains de puissance modeste. La première ligne de métro-
politain a été inaugurée le 1er juillet 1900. Très vite, cependant, les
puissances permises par le couple électromagnétique montrent
leur capacité : en 1903 une automotrice construite par AEG en
Allemagne, roule à 203 km/h ! Les grandes électrifications, aux
États-Unis et en Europe, étendent leurs mailles. L’après-guerre
marque la vraie naissance de la grande vitesse avec des records
du monde en 1954 à 243 km/h et 1955 à 331 km/h. Parallèlement
l’électrification ferroviaire en fréquence industrielle (50 Hz) voit le
jour en France dès 1951. Dès lors la quasi-totalité des nouvelles
électrifications dans le monde sera de ce type.
Enfin l’extension des lignes à grande vitesse se fera à partir du
Japon (Tokaïdo en 1967) et de la France (expérimentation du
TGV 001 à turbine à gaz et transmission électrique en 1972 et pre-
mière ligne TGV Paris Sud Est en 1981).

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
_____________________________________________________________________ COMPOSANTES ET APPLICATIONS ÉLECTRIQUES DU SYSTÈME FERROVIAIRE
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5 510 − 3
2. Technologie de base
« roue – rail »
Le guidage et le roulement de deux roues à boudin sur deux
poutres appelées « rails » est à la base du système ferroviaire,
quelle que soit l’énergie de traction. Cette technologie a deux pro-
priétés essentielles :
—répartition de la charge sur le sol ;
—guidage de tous les véhicules associés pour former un train.
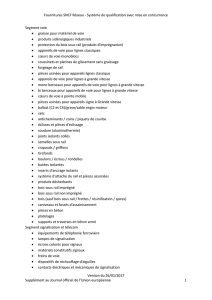
Un dérivé de cette technologie met en œuvre le pneumatique de
roulement associé à des roues latérales de guidage, et est utilisé
en transport urbain lourd, du type métro (figure 2).
Notons que les roues à pneumatiques sont associées à des
roues classiques à boudins et la voie comporte deux files de rails
en plus des pistes, afin d’assurer la sécurité de roulement en cas
de crevaison, tant du point de vue guidage que du point de roule-
ment. Le franchissement des appareils de voie est assuré égale-
ment par le guidage des roues à boudin.
La caractéristique fondamentale du roulement est le coefficient
de frottement lors du roulement. Le rapport de l’effort tangentiel
maximal résultant du couple à la masse sur la roue est le coeffi-
cient d’adhérence. Pour les deux types de roulement et différents
matériels les coefficients d’adhérence évoluent comme indiqué au
tableau 1.
3. Infrastructure
Comme tout système de transport, le chemin de fer nécessite une
infrastructure au sol. Elle se décompose en trois sous ensembles
principaux :
—plate-forme et voie ;
—ouvrages d’art ;
—terminaux et gares.
3.1 Plate-forme et ballast
La plate-forme représente l’emprise au sol. En France, la plate-
forme occupée par les chemins de fer représente 97 000 ha en
2003. La construction d’une ligne nécessite dans la plupart des cas
des aménagements spécifiques tels que talus, remblais, déblais,
avec apport ou extraction de matériaux. Des précautions particuliè-
res permettent le drainage et l’évacuation des eaux pluviales. Sur
la plate-forme est répandue le ballast constitué de granulat dur et
anguleux. Il assure une répartition uniforme des charges sur la
plate-forme et la bonne tenue transversale de l’ensemble. La quan-
tité de ballast peut atteindre 4 000 tonnes par kilomètre.
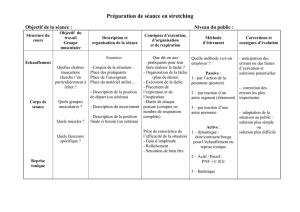
L’ensemble voie-plate-forme est constitué comme représenté sur
la figure 3.
3.2 Rail et traverses
Le rail est un profilé qui supporte la charge de la roue et permet
son roulement et son guidage. L’acier utilisé doit satisfaire aux
sévères contraintes de fatigue, corrosion et abrasion. Sa
composition, outre le carbone, comprend manganèse, silicium,
phosphore et soufre.
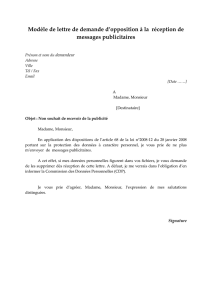
Les dimensions varient suivant les pays et les lignes. Dans le cas
le plus général des trafics importants la masse linéaire du rail est
de 60 kg/m. Une variante « à gorge » permet son insertion en
chaussée pour les voies urbaines (figure 4). Les deux files de rail
sont fixées sur les traverses qui maintiennent leur écartement et
répartissent la charge sur le ballast. (0)
Figure 2 – Roulement fer – fer et roulement pneumatique
Figure 3 – Ensemble voie et plate-forme
Piste de
guidage
Piste de roulement
Roues
Boudins
Rails
roulement pneumatique
b
roulement fer-fer
a
1,5 m 3,6 à 4,8 m selon vitesse
Ballast
Sous couche
Couche de fondation
Géotextile
Dispositif de drainage
Couche anticontaminante
Couche de forme
Tableau 1 – Coefficients d’adhérence : exemples
Paramètres
Roulement fer – fer Roulement
pneumatique
Rame TGV
(2 motrices) Locomotive
en Europe Locomotive
aux USA
Nombre d’essieux moteurs 4 + 4 4 6 –
Masse par essieu....................................................(t) 17 22,5 31,5 –
Effort total aux jantes .........................................(kN) 220 320 900 –
Adhérence au démarrage ....................................(%) 17 36 48 60

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
COMPOSANTES ET APPLICATIONS ÉLECTRIQUES DU SYSTÈME FERROVIAIRE ______________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5 510 − 4© Techniques de l’Ingénieur, traité Génie électrique
Le rail sert également de conducteur électrique, soit pour le
retour du courant de traction, soit pour les courants de signalisa-
tion. Sa caractéristique électrique s’exprime par sa résistance linéi-
que R à une température de 20 oC.
Le tableau 2 en donne deux exemples.
(0)
En première approximation, la formule suivante donne, pour une
ligne à roulement sur fer, la résistance linéique R (en Ω/m) du rail :
L’utilisation de pistes métalliques pour le roulement sur pneuma-
tique permet de diminuer la résistance longitudinale du rail : pour
une piste de masse linéique 68 kg/m, R = 22,8 Ω/km. Les barres de
guidage latéral, faisant fonction de troisième rail conducteur, ont
une résistance linéique proche : R = 21,9 Ω/km pour une masse
linéique m = 44,2 kg/m.
3.3 Contraintes électriques de la voie
Quel que soit le type de distribution du courant de traction, caté-
naire ou rail conducteur latéral, le retour du courant s’effectue par
les rails de roulement.
■Courant continu
Les intensités élevées absorbées par les engins moteurs
engendrent d’importantes chutes de tensions.
Cette chute de tension est considérablement réduite en reliant
toutes les files de rails en parallèle au moyen de liaisons transver-
sales. Il reste néanmoins une tension résiduelle provoquant la cir-
culation de courants « vagabonds » entre rails et sol, l’isolement de
l’un par rapport à l’autre étant difficile à réaliser du fait de la qualité
des traverses, du ballast et des conditions atmosphériques. Le
niveau de ces courants peut atteindre 20 % du courant de traction.
Certaines dispositions sont à prendre pour s’assurer qu’effecti-
vement ce retour se fasse avec toutes les garanties de sécurité,
notamment celle du personnel amené à intervenir sur les voies.
Pour ce faire, les rails doivent avoir une conductibilité aussi par-
faite que possible pour éviter les surtensions et les courants
« vagabonds » par le sol. Les discontinuités de rails au droit des
joints à éclisses, sont résolues par des connexions en cuivre fixées
par brasure sur la face extérieure du champignon (figure 5).
■Courant alternatif
Le cheminement du courant de retour n’emprunte les rails qu’au
droit des points d’alimentation et de charge pour s’amortir rapide-
ment entre ceux-ci. Le courant mesurable dans le rail comprend
deux composantes :
—le courant de retour traction, d’intensité Ir absorbée par
l’engin de traction ;
—le courant induit se propageant dans les rails et provenant de
l’induction électromagnétique propre au courant caténaire Ic.
Leur répartition est représentée figure 6.
4. Matériel roulant
On distingue :
—le matériel remorqué destiné aux clients (passagers ou fret) ;
—le matériel moteur assurant la traction du matériel remorqué.
4.1 Matériel remorqué
Ses caractéristiques sont fonction de l’usage pour lequel il est
conçu :
—masse ;
—résistance à l’avancement ;
—puissance installée.
Le tableau 3 en donne quelques exemples.
Figure 4 – Types de rails
Tableau 2 – Résistance linéique R à 20 oC en fonction
de la masse linéique m de quelques types de rails
Type Masse
(kg/m) R
(Ω/km)
Rail UIC (1) ...................................................... 60 27,8
Rail à gorge..................................................... 56 29,08
(1) UIC : Union internationale des chemins de fer (http://www.uic.asso.fr).
Cet organisme (créé en 1922), regroupant la plupart des réseaux et opé-
rateurs ferroviaires, a défini des profils de référence pour les rails, d’où
le terme « rail UIC ».
Exemple : pour un courant d’intensité I de 4 000 A et une résis-
tance linéique R = 0,02 Ω/km, la chute de tension U est :
U = Rl = 0,02 × 4 000 = 80 V/km
soit 800 V pour une distance de 10 km.
Champignon
Âme
Patin
rail à gorge ou « tramway »
b
rail « vignole »
a
R1
670
m
----------------=
Figure 5 – Éclissage de la voie et connexion
Figure 6 – Coexistence du courant de retour traction
et du courant induit par la caténaire
Brasure
10 5 0 5 10
Distance entre deux points
d'alimentation et de charge : 20 km
Courant dans la caténaire
Courant total rail
Ic courant
induit dans
les rails
Ic courant
de retour
traction
015 510
0
25
50
75
100
km
Intensité (A)

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
_____________________________________________________________________ COMPOSANTES ET APPLICATIONS ÉLECTRIQUES DU SYSTÈME FERROVIAIRE
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 5 510
−
5
(0)
(0)
4.2 Matériel moteur
En fonction du programme de traction, les catégories de matériel
moteur sont :
—les matériels moteurs dédiés à la traction ;
—les matériels moteurs intégrant les passagers.
■
Matériel moteur dédié à la traction
L’ensemble de l’engin comporte uniquement les fonctions dévo-
lues à la traction et à sa conduite.
Suivant le niveau de puissance installée et de son usage, on
distingue :
—la
locomotive
pour une puissance supérieure à 800 kW ;
—le
locotracteur
pour une puissance inférieure à 800 kW, des-
tiné au trafic restreint des manœuvres.
■
Matériel moteur intégrant des passagers
En sus des fonctions de traction et de freinage, l’engin comprend
tous les équipements destinés aux passagers : sièges, accès, toi-
lettes, bagages, climatisation, éclairage, etc.
●
Si ce matériel est à
traction électrique
, il s’appelle
Automotrice
(ou EMU :
Electrical Multiple Unit
) ; une rame de métro comme un
tramway en font partie.
●
S’il est à
traction autonome à moteur thermique,
c’est un
«
Automoteur
» (ou DMU :
Diesel Multiple Unit
).
●
L’étagement des puissances par élément moteur, selon le type
d’engin, est résumé par le tableau
4
.
4.3 Configuration des trains
Suivant la disposition du matériel remorqué et de ou des engins
moteurs, on définit les notions suivantes :
—
rame
: c’est la composition complète d’un train : engin(s)
moteur(s) + matériel remorqué ;
—
réversibilité :
un train est dit réversible s’il peut circuler dans
les deux sens sans inverser sa composition. La conduite est assurée
à partir des deux extrémités. C’est le cas de tous les automoteurs
et automotrices ;
—
unité simple
(US) : la rame comporte un seul engin moteur ;
—
unités multiples
(UM) : la rame comporte deux (ou plus)
engins moteurs. Tous les engins moteurs sont conduits par un seul
agent. L’unité multiple peut être
accolée
si les engins sont attelés
ensemble ;
répartie
s’ils sont répartis dans la rame. Leur commande
est assurée par liaison filaire ou hertzienne (figure
7
).
5. Énergie
5.1 Énergie de traction
L’énergie de traction est de deux natures :
—l’
énergie autonome
: les engins embarquent à bord leur
combustible. C’est le cas le plus répandu dans le monde puisque
80 % des engins moteurs sont à traction autonome. Les infrastruc-
tures nécessaires sont alors limitées à de simples stations-service
de ravitaillement ;
—l’
énergie électrique distribuée le long des lignes
permet son
utilisation directe par les engins. Les infrastructures sont dans ce
cas très importantes et coûteuses de sorte que les investissements
correspondants doivent être rentabilisés par un trafic important et
un rendement élevé. L’énergie électrique n’est utilisée que par 20 %
des engins moteurs dans le monde. Son extension est fonction de
la densité d’industrialisation environnant les réseaux.
Tableau 3 – Caractéristiques principales du matériel remorqué
Type Masse
(t)
Résistance à l’avancement
(kN)
(1)
Puissance installée
(kVA)
Voiture passagers
(80 places)
45 40
(dont 80 % chauffage
et climatisation)
Wagon transport combiné60 0
(1)
m
t
: masse totale du véhicule en tonne.
v
: vitesse en km/h.
R
V
: résistance à l’avancement pour le transport de voyageurs.
R
F
: résistance à l’avancement pour le fret.
Rv
mt
100
----------- 1,5 v2
4
500
----------------+
=
RF
mt
100
----------- 1,2 0,01 v⋅0,000
35
v
2
⋅
++
()
=
Tableau 4 – Étagement des puissances des engins moteurs
Engins Trolleybus Tramway Métro Automotrice Rame
à grande vitesse Locomotive
Puissance
..... (kW) 200 300 à 500 400 à 800 800 à 1 200 2 000 à 4 500 1 200 à 6 000
Figure 7 – Configuration des trains
Unité multiple accolée
Unité multiple répartie
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%