la mecanique du tennis de table

GABORIEAU François
BREDIN Hervé
Lycée Clemenceau
MSPI 2 - juin 2000
LA MECANIQUE DU TENNIS DE TABLE
Etude des forces
Etude des trajectoires
Modélisation du rebond
LA MECANIQUE
DU
TENNIS DE TABLE
Etude des forces Etude des trajectoires Modélisation du rebond
Le poids Mise en équation Présentation du modèle
La force de traînée Programme Maple Validité du modèle
L'effet Magnus Influence de l'effet

ETUDE DES FORCES
EXPRESSION DU POIDS
Système : la balle de tennis de table
Référentiel du laboratoire galiléen
La balle est à l'équilibre sur un support.
Bilan des forces :
T
réaction du support
F
reste des forces
Par définition du poids
P
, obtenu à partir du théorème du centre d'inertie :
P=
F=−
T
Plus précisément,
P=m⋅
g
m
masse de la balle (en
kg
)
g
vecteur champ de gravitation
En négligeant la rotation de la Terre sur elle-même et donc la force d'inertie
d'entraînement, on peut supposer que
g
est selon l'axe balle-centre de la terre.
On prendra, dans la suite de l'étude,
m=2.5g=2.5⋅10−3 kg
et
g=9.81m⋅s−2
.
LA MECANIQUE
DU
TENNIS DE TABLE
Etude des forces Etude des trajectoires Modélisation du rebond
Le poids Mise en équation Présentation du modèle
La force de traînée Programme Maple Validité du modèle
L'effet Magnus Influence de l'effet

ETUDE DES FORCES
EXPRESSION DE LA FORCE DE TRAINEE
Nombre de Reynolds
On trouve dans la littérature une expression du nombre de Reynolds pour une sphère
lisse :
Re=r⋅v
r
rayon de la sphère
v
vitesse de l'écoulement dans le référentiel de la sphère
viscosité cinématique du fluide
Dans notre cas particulier, la sphère est une balle de tennis de table et le fluide l'air du
laboratoire, d'où
r=1.9cm=1.9⋅10−2 m
et
=air=1.5⋅10−5 m2
⋅s−1
.
Par conséquent,
Re≃1300 ⋅v
avec
1v100 m⋅s−1
, d'où
103Re105
.
Force de traînée
La force de traînée est la composante parallèle à
v∞
de la résultante des forces dues à
l'écoulement du fluide,
v∞
étant la vitesse d'écoulement du fluide.
Dans notre cas particulier, le fluide n'est autre que l'air du laboratoire, que l'on suppose
au repos dans le référentiel du laboratoire, de sorte que
v∞=−
v
où
v
est la vitesse de la
balle de tennis de table dans ce même référentiel.
Pour
103Re105
, la traînée est approximativement proportionnelle au carré de la
vitesse.
La littérature nous donne alors l'expression de la force de traînée :
Ftraînée=−1
2⋅Cx⋅⋅⋅r2 ⋅v⋅
v
Cx
coefficient de traînée
masse volumique de l'air
r
rayon de la balle
v
vitesse de la balle
On pose
h=1
2⋅Cx⋅⋅⋅r2
, d'où
Ftraînée=−h⋅v⋅
v
avec
h
en
kg⋅m−1
.
D'après la littérature,
Cx≈1
puisque la balle peut-être assimilée à une sphère. On en
tire donc la valeur théorique du coefficient
h≈6.8⋅10−4 kg⋅m−1
.
On réalise alors l'expérience décrite à la page suivante afin de déterminer
expérimentalement la valeur du coefficient
h
. L'exploitation des résultats mesurés lors de
l'expérience nous donne une valeur de
h
très proche de la valeur théorique : on obtient en
effet
h=7.3⋅10−4 kg⋅m−1
.
Dans la suite de l'étude, et en particulier dans l'étude des trajectoires, on utilisera, pour
plus de commodité, l'expression suivante de la force de traînée, aussi appelée force de
frottement :
Ftraînée=−h⋅v⋅
v
avec
h=7.3⋅10−4 kg⋅m−1
LA MECANIQUE
DU
TENNIS DE TABLE
Etude des forces Etude des trajectoires Modélisation du rebond
Le poids Mise en équation Présentation du modèle
La force de traînée Programme Maple Validité du modèle
L'effet Magnus Influence de l'effet

ETUDE DES FORCES
DETERMINATION EXPERIMENTALE DE LA CONSTANTE h
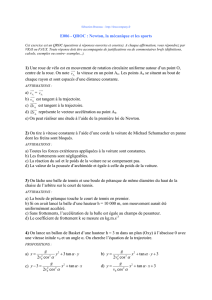
Manipulation
On utilise une balance pour « peser » la force de frottement fluide qui s'exerce sur la balle de
tennis de table.
Une soufflerie crée un flux d'air de vitesse connue (une abaque donne la vitesse de sortie de
l'air en fonction de la tension alternative appliquée), ce flux d'air applique donc sur la balle de
tennis de table une force de traînée du type
f=h⋅v⋅
v
où v représente ici la vitesse de l'air
dans le référentiel de la balle de tennis de table (qui est aussi le référentiel du laboratoire).
On équilibre l'appareil avec la petite masselotte que l'on déplace sur le bras de façon à placer
l'aiguille de la balance en face du repère.
On arrête la soufflerie et on rééquilibre la balance en plaçant des masses marquées sur
l'extrémité de l'autre bras.
Résultats
L'abaque nous donne
v=7 m⋅s−1
.
D'autre part, on mesure à l'aide d'une balance électronique
m2 =3.65g=3.65⋅10−3 kg
.
Exploitation
Système : le bras de la balance avec la balle de tennis de table, la masselotte mobile et
éventuellement les masses marquées
Référentiel du laboratoire supposé galiléen
On applique le théorème du moment cinétique en O au système (O est le point de rotation de
l'axe).
LA MECANIQUE
DU
TENNIS DE TABLE
Etude des forces Etude des trajectoires Modélisation du rebond
Le poids Mise en équation Présentation du modèle
La force de traînée Programme Maple Validité du modèle
L'effet Magnus Influence de l'effet
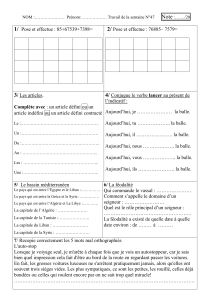
LL
a
mb⋅g
h⋅v2
m1
⋅g
Avec la soufflerie en marche
LL
a
mb⋅g
m1 ⋅g
Avec la soufflerie à l'arrêt
m2
⋅g

ETUDE DES FORCES
1 er
cas : la soufflerie est en marche, il n'y a pas de masses marquées.
Notons
ex
le vecteur unitaire sortant de la figure.
Notons
M0mb
⋅
g
,
M0m1
⋅
g
et
M0h⋅v⋅
v
les moments en O respectifs du poids de la
balle, du poids de la masselotte et de la force de traînée.
M0mb⋅
g=
OB∧mb⋅
g=L⋅mb⋅
ex
M0m1
⋅
g=
OA∧m1
⋅
g=a⋅m1
⋅
ex
M0h⋅v⋅
v=
OB∧h⋅v⋅
v=−L⋅h⋅v2
ex
En écrivant que la dérivée du moment cinétique est nulle, donc que la somme des moments en
nulle, et en projetant sur
ex
, on obtient :
L⋅mb⋅ga⋅m1 ⋅g−L⋅h⋅v2 =0
(1)
2 ème
cas : la soufflerie est à l'arrêt, les masses marquées assurent l'équilibre.
Notons
M0m2⋅
g
le moment en O du poids des masses marquées.
M0mb⋅
g=
OB∧mb⋅
g=L⋅mb⋅
ex
M0m1
⋅
g=
OA∧m1
⋅
g=a⋅m1
⋅
ex
M0m2⋅
g=
OM∧m2⋅
g=a⋅m2⋅
ex
En écrivant l'équilibre et en projetant sur
ex
, on obtient :
L⋅mb⋅ga⋅m1
⋅g−L⋅m2 ⋅g=0
(2)
En effectuant (1)-(2), on obtient
L⋅h⋅v2=L⋅m2 ⋅g
, soit
h=m2 ⋅g
v2
Application numérique :
h=7.3⋅10−4 kg⋅m−1
LA MECANIQUE
DU
TENNIS DE TABLE
Etude des forces Etude des trajectoires Modélisation du rebond
Le poids Mise en équation Présentation du modèle
La force de traînée Programme Maple Validité du modèle
L'effet Magnus Influence de l'effet
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%