ARCHITECTURE DES ORDINATEURS. Le cours est basé sur le

ARCHITECTURE DES ORDINATEURS.
Le cours est basé sur le livre de William Stallings (800 pages) qui s’intitule « Organisation et
architecture des ordinateurs », 6ème édition.
Voici le plan général :
INTRODUCTION
L’ORDINATEUR
LE PROCESSEUR
L’UNITE DE CONTROLE
ORGANISATION PARALLELE
INTRODUCTION.
Vue fonctionnelle
Structure d’un ordinateur
Evolution et performances des ordinateurs.
Unités de mesure des tailles de la mémoire d’un ordinateur.
VUE FONCTIONNELLE
Les 4 fonctions principales d’un ordinateur.
Traitement des données.
o Opérations arithmétiques.
Mémorisation des données.
o Mémoire a long terme
o Mémoire a court terme
Transfert de données.
o Vers l’extérieur
o De l’extérieur
Contrôle
o Vérification des opérations possibles et non autorisées.
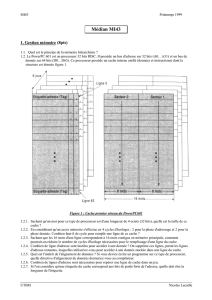
VUE FONCTIONELLE.
Environnement de fonctionnement (exploitation)
(source de destination des données)
Dispositif de
Tansfert des
Données
Mécanismes de
Contrôle
Structure de Structure de
Mémorisation des traitement des
Données données

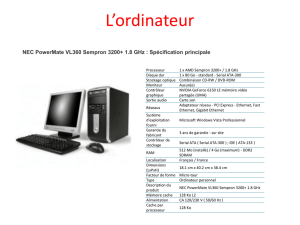
STRUCTURE D’UN ORDINATEUR.
Processeur (CPU = Central Process Unit)
o Contrôle et exécute les fonctions de traitement des données
o Il peut y en avoir plusieurs.
Mémoire principale.
o Mémorise les données.
E/S
o Transfert les données entre l’ordinateur et son environnement externe.
Interconnexion des ordinateurs (Bus système)
o Prend en charge la communication entre le processeur, la mémoire
principale et les E/S.
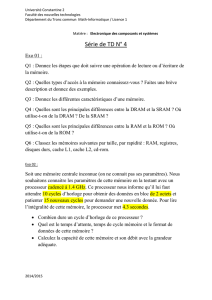
Le processeur est composé de 4 éléments :
1. Unité de contrôle (UC).
Contrôle le fonctionnement du processeur et donc de l’ordinateur.
2. Unité arithmétique et logique (UAL).
Exécute les fonctions de traitement des données de l’ordinateur.
3. Registres.
Mémoire interne du processeur.
4. Interconnexion du processeur.
Prend en charge les communications entre l’UC, l’UAL et les registres.
EVOLUTION ET PERFORMANCES.
Quelles sont les évolutions technologiques constantes en informatique.
La vitesse du processeur.
Cadence des BUS.
Capacité de stockage, capacité mémoire.
Augmentation constante de la vitesse des processeurs.
Miniaturisation de la taille des composants.
o Réduction des distances entre les composants.
o Augmentation du nombre de composants.
Augmentation de la taille de la mémoire.
Augmentation des débits des E/S.
1946 : ENIAC.
Lohn Mauchly et John Presper Eckert, université de Pennsylvanie.
2ème guerre mondiale : portée et trajectoire des missiles.
30 tonnes, 500 m² au sol, 18 000 tubes à vide.
o 1 tube = 1 chiffre
5000 additions par secondes.
Ordinateur décimal.
Il fallait brancher et débrancher manuellement les câbles.
1952 : Machine de John Von Neumann
Idée : ranger les programmes en mémoire et non plus tout câbler et recâbler a chaque
fois.
Cet ordinateur (IAS) a servi de base a tous les autres ordinateurs généralistes.
Données en instructions sont représentées en code binaire.
Une UAL est déjà basée sur l’utilisation de registres.
1950 : Commercialisation des premiers ordinateurs.

UNIVAC I, UNIVAC II, UNIVAC 1103 par J. Eckert et J. Mauchly.
1953 : IBM commercialise le 701.
1950 : Bell créé le transistor (en silicium) qui vont remplacer les tubes à vide à la fin des
années 50.
2ème génération d’ordinateurs.
GENERATION
DATES
TECHNOLOGIES
N bop/s
1
46-57
Tubes à vides
40 000
2
58-64
Transistors
200 000
3
65-71
Micro électronique
Puces et circuits
intégrés
1 000 000
4
72-77
Intégration à grande
échelle
10 000 000
5
78 - …
Intégration à très
grande échelle
100 000 000
4ème et 5ème génération : ordinateurs de bureau et ordinateurs personnels (un PC de 3ème
génération coûtait 16 000 US$)
Evolution des processeurs Intel.
8086 à 80486 : 8 à 64 bits en largeur de bus.
Pentium : Introduction de la parallélisation des traitements des instructions.
Pentium pro : Prédiction des branchements et instructions.
Pentium II : Traitements spécifiques des flux multimédia.
Pentium III : Instructions supplémentaires pour les logiciels de graphismes 3D.
Pentium IV : Instructions supplémentaires pour le multimédia.
Itanium : Introduction de l’Intelligence Artificielle (IA).
Evolution du Power PC (IBM avec système RISC).
601/620 : 32 à 64 bits de largeur de bus.
740/750 (3ème génération) : cache intégré dans la puce du processeur central.
4ème génération : Augmentation du parallélisme et de la vitesse interne du processeur.
UNITES DE MESURE DES TAILLES DE LA MEMOIRE D’UN ORDINATEUR.
L’information est codée en binaire :
Un bit peut prendre 2 valeurs : 0 ou 1.
Un kilobit (Kb) est égal à 2^10 soit 1024 bits exactement.
Un megabit (Mb) est égal à 2^20 bits soit 1 048 576 bits exactement.
Un gigabit (Gb) est égal à 2^30 bits soit 1 073 741 824 bits exactement.
1 = 0001b
2 = 0010b
3 = 0011b
4 = 0100b
5 = 0101b
6 = 0110b
7 = 0111b
8 = 1000b
Dans la plupart des ordinateurs, chacun des caractères est codé sur 8 bits.
On peut donc coder 2^8 caractères différents soit 256 caractères.
Un octets = 8 bits.
Attention à la traduction américaine : un octet = un Byte.

1 KB = 1 Ko.
1 Ko = 2^10 octets
1 Mo = 2^10 Ko = 2^20 Octets
1 Go = 2 ^10 Mo = 2^20 Ko = 2^30 octets.
1 Ko = 8 Kb.
1 Mo = 8 Mb
…
L’ORDINATEUR.
Système d’exploitation et architecture des ordinateurs
Architecture des ordinateurs :
L’ordinateur
Fonction d’un ordinateur
La mémoire cache est une mémoire intermédiaire, on charge les instructions qui sont
l’ensemble du programme ;
La mémoire interne est la mémoire principal ;
La mémoire externe, ex : lecteur dvd, disque dur ;
Les entrés sorties : souris, clavier.
Exécuter des programmes ;
Les programmes se composent d’un ensemble d’instructions ;
Les instructions sont rangées en mémoire ;
Les composants de l’ordinateur :
Processeur
Mémoire (stocker les donnés)
Module entré sortie
Bus système (prend en charge toutes les communications entre les élément ;
CP : compteur de programme, adresse mémoire des instructions, augemente la vitesse
CPU : registre interne, registre tampon
RI : registre interne
RT :
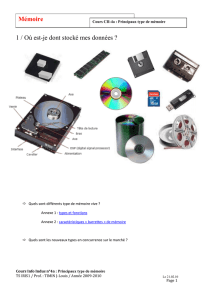
Le processeur lit une à une les instructions dans la mémoire et les exécute ;
Le cycle d’instruction est le traitement nécessaire pour une instruction :
Lecture d’une instruction
Lecture d’une ou plusieurs opérandes
Rangement d’une ou plusieurss opérandes
Test d’interruption (sert à vérifier les instructions).
Le CP (compteur de programme) contient l’adresse de lza prochaine instruction à lire :
Il est incramenté à chaque lecture
Le processeur place l’instruction du CP dans le RI (registre interne) et incrémente le CP ;
Puis il traite l’instruction.
Types d’instructions en mémoire : calculs, mise en mémoire, vérifications
L’intruction peut-être :
Une lecture ou une écriture mémoire
Une lecture ou une écriture E/S
Un traitement arithmétique des données
Un contrôle : la prochaine instruction est à l’adresse…

(Cas des instructions conditionnelles et des appels de sous-programmes)
Une interruption comme (sont nom l’indique) interrompt le cycle d’instructions ou le
programme en cours d’exécution.
Types d’interruptions : temporisations, manque de mémoire, vérification exécution d’autres
programmes, reset,
Une interruption peut être :
Une interruption de programme :
Dépassement de capacité
Division par 0
Instruciton illégale
Un temporisateur :
Permet au système d’exploitation d’effectuer régulièrement certaines fonctions
Une interruption E/S :
Exemple : l’utilisateur écrit au clavier
Une défaillance matérielle
Pour chaque périphérique E/S il y a un gestionnaire d’interruption
Un périphérique E/S
Les différentes structures de bus :
Les lignes de données
Transmettent uniquement des données
Déterminent les performances
Les lignes d’adresses
Désignent la source ou la destination des données du bus de données
Les lignes de contrôle
Contrôlent l’accès et l’utilisation des lignes de données et d’adresse
Physiquement, ce sont des lignes métalliques gravées sur la carte.
Ordinateurs modernes :
Hiérarchisation des bus
Des tampons sont ajoutés entre les bus
Le bus PCI
Bus interne permettant de connecter des cartes d’extension sur la carte
mère d’un ordinateur
Bus haut débit
Indépendant du processeur
Meilleurs performsances que le bus système
La mémoire cache
Influence directe sur la performance d’un ordinateur
Pour améliorer les performances :
Garder au plus près du processeur (en cache), les accès récents
De manière à accéder le moins possible à la mémoire externe
La mémoire cache est une copie de certaines parties de la mémoire principale ;
Lorsque le processeur tente de lire un mot, il vérifie auparavant s’il ne se trouve pas déjà dans
le cache ;
L’accès aux mots est ainsi plus rapide ;
Si le mot ne se trouve pas dans le cache, on copie d’abord le bloc dans le cache ;
Puis le cache donne l’accès au mot au processeur ;
Il est fort probable que lorsqu’on souhaite accéder à une information d’un bloc, on souhaite
accéder aux informations environnantes de ce mot dans le bloc.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%