Document Deug SCVT biophysique

Complements de mathématiques
Maria Barbi
Ces notes représentent un complement aux outils mathématiques (OM) du module de biophysique (1
ère
année deug SVT). Elles ne fournissent pas un cours complet de mathématique, ni les détails des diffé-
rents sujets traités, qui devraient d’ailleurs représenter un bagage déjà acquis pour les étudiants de ce
cours. Leur but est plutôt de donner le cadre d’ensemble des concepts de mathématiques traités dans les
OM et utilisés dans les TD de biophysique (et plus en général dans la thermodynamique standard), de
façon à montrer comme les différents sujets sont logiquement corrélés entre-eux et avec les problèmes
traités en cours et TD. On cherchera donc à montrer l’unité logique des définitions et méthodes qui vont
de l’étude de fonctions aux variations finies à la définition de la différentielle et à celle d’intégrale, en
soulignant les idées générales qui en sont à l’origine et qui représentent la base de l’étude physique.
L’accent mis sur un traitement plutôt “synthétique” que “analytique” devrait permettre aux étudiants
une consultation ponctuelle de ces notes à tout moment, comme d’un résumé des quelques concepts
mathématiques importants pour les études physiques d’intérêt. Sans prétendre à avoir une rigueur ma-
thématique, on a suivi une approche plus physique et pragmatique des différents sujets, en donnant aussi
quelques exemples simples et des références explicites aux thèmes traités en TD. La présentation est
souvent et volontairement très élémentaire, car on a estimé plus important de donner à tous la possibilité
d’avoir un minimum d’intuition et de familiarité avec les méthodes classiques de la description physique
des systèmes et ses définitions de base.
Table des matières
1 L’étude d’un système physique 2
2 Les variables et les fonctions physiques 2
3 Les grandeurs physiques changent suite à une transformation : le symbole !2
4 Déterminer les “valeurs finales” des variables 3
4.1 Transformation à yconstante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
4.2 Dépendance explicite de yde x. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5 Et si on ne connaît pas la fonction ? Le calcul différentiel 4
5.1 La dérivée totale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
5.2 La différentielle d. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
5.3 Les dérivées partielles : ". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
6 Les équations différentielles 7
6.1 Un exemple : la loi de la dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
7 En thermodynamique ? Retour au !7
7.1 Relations entre différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
7.2 Intégrer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
8 Cela dépend du chemin parcouru ? 10
8.1 Fonctions d’état . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
8.2 Différentielles exactes et non exactes : det #. . . . . . . . . . . . . . . . . . . . . . . . 10
8.3 Travail et chaleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1

9 Différentielles et équilibre 11
1 L’étude d’un système physique
Considérons un système physique quelconque (mécanique, thermodynamique... un ressort, un gaz, un
morceau de métal...) : comment peut-on décrire son comportement ?
Il faudra décrire son état et la façon dont il change si les conditions auxquelles il est soumis changent.
Et comment décrit-on l’état d’un système physique ?
On pourra définir différentes grandeurs physique caractérisant le système dans chaque état : température
T, pression P, volume Vpour un gaz, mais aussi énergie cinétique des molécules qui le composent...
longueur lpour un ressort, vitesse vpour une masse ; énergie aussi pour un système mécanique, etc. Le
problème reviendra donc à étudier quelles valeurs de ces grandeurs sont permises une fois que l’on a fixé
les autres ou encore comment chacune de ces grandeurs change si les autres changent.
2 Les variables et les fonctions physiques
On aura donc affaire à des variables du système. Souvent, deux de ces variables suffisent à déterminer
toutes les autres, et l’on pourra alors en choisir deux (les deux qui conviendront le mieux cas par cas) et
étudier leur dépendance réciproque.
E(l)
1
E(l)
2
E
l
l
l
0 1 l2
V
P
(V)
V
0
0
P
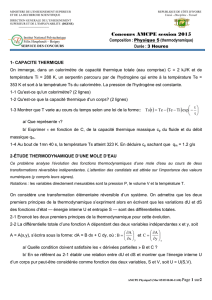
FIG. 1 – (a) Énergie du ressort en fonction de sa longueur. (b) Isotherme dans le diagramme pression-
volume pour le gaz parfait.
Les courbes que l’on a dessiné répondent à la première question : comment une variable change en
fonction de l’autre. Dans les figures précédentes, on a choisi deux couples de variables pour chaque sys-
tème : let E,Vet P. On pourrait les appeler comme on fait souvent xet y, ou tet f. On parlerait en ce cas
des fonctions y(x)ou f(t), et l’on peut aussi bien écrire E(l), ou P(V). Remarquons comme l’importance
du concept de fonction et sa puissance sont évidents : nous avons une expression mathématique simple et
synthétique qui permet de déterminer directement la valeur de la variable y, pour n’importe quelle valeur de
la variable x; de plus, l’existence de cette relation explicite peut nous permettre de dériver facilement cer-
taines propriétés générales, (comme par exemple de savoir si yest toujours positive, si elle croit ou décroît
quand on augmente x,etc.), à travers une étude de la fonction. En décrivant la relation entre deux para-
mètres physiques comme une fonction mathématique, on se donne les moyens mathématiques d’étudier
cette relation.
3 Les grandeurs physiques changent suite à une transformation : le
symbole !
- Cas par cas, des variations des variables choisies feront l’objet de nos problèmes. Il faut savoir
clairement de quoi il s’agit et quelle notation on utilise pour indiquer ces variations.
2

Lors que l’on considère le changement d’une variable entre un état initial I et un état final II, on utilise le
symbole !pour sa variation : si le ressort, initialement étiré jusqu’à une longueur lIpasse à un étirement
lII , on écrira
!l=lII −lI
pour indiquer cette variation, et de façon analogue on pourra parler d’une variation finie (c’est à dire, ni
infinie, ni proche de zéro) de la température !T=TII −TI, de l’énergie !E=EII −EIetc.
Le symbole !indique, de façon générale, une variation finie. Il pourra être alors utilisé aussi dans des
contextes différents pour indiquer la variation d’une variable par rapport à sa valeur d’équilibre, plutôt que
à sa valeur de départ : un cas classique est encore l’étirement du ressort, pour lequel on pourra donc dans
certains cas utiliser le même symbole !lpour indiquer l−l0,létant son étirement à un instant donné, l0sa
longueur d’équilibre.
En tout cas !indique une différence entre deux valeurs d’une même variable, mesurées dans deux états
(en général) distincts.
4 Déterminer les “valeurs finales” des variables
Peut-on déduire la variation totale d’une deuxième variable, par exemple la pression, !P, si l’on connaît
celle d’une première variable, par exemple du volume, !V, suite à une transformation des conditions im-
posées au système ?
Dans les cas que l’on va considérer, cela sera souvent le cas, mais la méthode à utiliser n’est pas toujours
la même.
Considérons, de façon générale, le problème de connaître la valeur finale d’une variable y, dont on
connaît la valeur initiale yI, après une transformation du système physique considéré, en sachant que cette
transformation a fait passer une autre variable xde la valeur xIàxII . Nous allons avoir besoin d’informations
supplémentaires sur le type de transformation faite.
4.1 Transformation à yconstante
Le cas le plus simple est celui où l’on sait que la transformation n’a pas changé y. On parle alors de
transformation à y constante. Dans ce cas, évidemment, on a tout de suite que yII =yI, et donc !y=0.
Remarquons que, en général, cela n’est possible que si yest indépendant de xcar autrement yaurait changé
au changement de x(sauf cas exceptionnels).
!
Exemple : si on fait une transformation isotherme, c’est à dire à température constante, où
l’on force par exemple le volume d’un gaz à changer, la température à la fin sera forcement la
même que celle de départ !
4.2 Dépendance explicite de yde x
Dans le cas où yest dépendant de x, s’il ne dépend que de xet si on connaît la “formule” de cette
dépendance, c’est à dire si on a une expression explicite pour la fonction y(x)(ce qui correspond 1à pouvoir
écrire y=y(x)ou y=f(x)), la réponse est encore très simple : on sait tout de suite que au départ on aura
yI=y(xI), à la fin, yII =y(xII ), d’où
!y=y(xII )−y(xI).
!
Exemple : pour un ressort de constante élastique
k
, comprimé ou étiré, l’énergie potentielle
(mécanique) est juste une fonction de l’étirement :
Ep=k(l−l0)2
. Si la longueur du ressort
passe de
l1
à
l2
, la variation d’énergie sera donc
!Ep=k(l2−l0)2−k(l1−l0)2
.
1Cela veut dire aussi qu’il est possible de tracer une courbe qui représente la valeur de ypour chaque x, donc la fonction y(x),
comme dans les figures 1(a) et 1(b).
3

!
Exemple : parfois, la fonction à utiliser est “cachée” dans une équation, mais c’est facile de
simplifier : si on cherche la pression finale pour un gaz parfait ayant subi une transformation
isotherme
du volume de
V1
à
V2
, on n’a que la loi de gaz parfait,
PV =nRT
. Mais il suffit
de noter que isotherme signifie à température constante pour écrire
nRT =Cte
. Donc,
P(V) =
nRT/V=Cte/V
est la fonction qui donne la pression pour un volume choisi. Il faudra encore
déterminer la constante...
Dans certains cas, yne pourra pas être déterminé par la seule valeur de x, mais sera dépendant d’autres
variables (Z,W,etc.) aussi. Cependant, si on connaît la fonction y(x,Z,W,etc.)et on est capable de dé-
terminer les valeurs des variables x,Z,W,etc. dans l’état final, on peut évidemment en déduire la valeur
finale de yaussi.
!
Exemple : en utilisant la loi des gaz parfaits
PV =nRT
on peut exprimer la pression
P
en
fonction de la température et du volume :
P=nRT /V
, d’où, pour une transformation quel-
conque, on aura
!P=nR(TII /VII −TI/VI)
.
Pour conclure, nous avons donc une solution “facile” à la question “comment change une variable ysi on
en fait changer d’autres x,Z,etc.”,dans tous les cas où on connaît explicitement la loi de dépendance entre
les deux, et les valeurs initiales et finales de x,Z,etc.
5 Et si on ne connaît pas la fonction ? Le calcul différentiel
Mais ce n’est pas toujours le cas : parfois, les données que nous avons sur la transformation effectuée
ne donnent pas toutes les informations sur l’état final, ou bien nous n’avons pas une fonction explicite pour
la grandeur cherchée.
Dans ces cas, on aura quand même une information complémentaire. Normalement, ce qui se passe
est que, bien que l’on ne connaisse pas la valeur d’Ypour des X,Z etc. fixées, on sait de combien Yva
changer si X,Zchangent d’une quantité très petite, c’est à dire on a des information sur les dérivées de
Ypar rapport aux autres variables, X,Z etc. Faisons donc un petit rappel du concept de dérivée.
5.1 La dérivée totale
On rappelle que pour les fonctions d’une seule variable telles que y(x), (ou f(t),etc.) on peut définir
une dérivée totale dy
dx =d
dx y(x), (ou bien d f
dt etc.), comme limite du rapport !y
!xdes variations finies !y
et !x, dit le taux d’accroissement
!y
!x=y(x2)−y(x1)
x2−x1
quand la variation !xtend vers zéro.
5.2 La différentielle d
Remarquons que dans l’expression précédente le symbole !a exactement le même sens que ce précé-
demment décrit : c’est une variation, la différence des deux valeurs assumés par la variable xentre deux
états ou points possibles.
Cependant, la notation et les techniques de calcul changent quand une telle variation !xest envoyée
vers sa limite, et devient si petite que dans l’intervalle correspondant la courbe y(x)peut se confondre avec
une droite (voir fig. 2(b)). On utilise alors une notation spéciale pour exprimer cette condition de limite et
on indique la variation infinitésimale, qu’on appelle aussi la différentielle de x, avec le symbole d:dx.
En d’autres termes, si xne varie que à l’intérieur du petit intervalle dx, alors la dépendance de yde xne
peut pas être distinguée d’une dépendance linéaire, et la fonction y(x)peut être remplacée par l’équation
d’une droite. D’où la définition usuelle de dérivée comme pente de la droite tangente. Mais attention : les
paramètres qui définissent cette droite (en particulier sa pente, dy
dx ) changeront si on choisit l’intervalle dx
près de différentes valeurs de x(fig. 2(b)) : la dérivée de ypar rapport à xest, elle aussi, une fonction de x.
4

Conséquence importante : la connaissance de la dérivée2dy
dx nous permet alors de déterminer combien
yva changer si on fait varier sa variable d’une quantité très petite dx à partir d’un point de départ x:yva
passer de y(x)ày(x+dx)que l’on peut écrire, grâce au fait que dx est “très petit”, comme
y(x+dx) = y(x) + dy ,
où la différentielle dy est donnée par
dy =dy
dx (x)dx;
cette possibilité d’écriture nous sera bientôt très utile.
!y
!x
x
!
y
(x+ x)
y(x)
y(x)
x
x
B
A
A
A0
pente
dy
dx 0
(x )
pente
dy
dx 1
(x )
x
y(x)
x
0
y
(x)
dx
dy
x
1
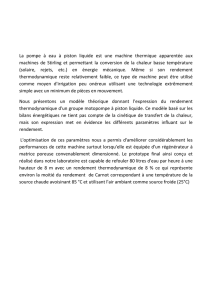
FIG. 2 – (a) Variations finies !xet !ypour une fonction y(x). (b) Les limites de ces variations, différentielles
dx et dy. Représentation de la relation géométrique entre dx et dy.
Toutes les fois que l’on écrit dx (ou dy,dT ,dV etc.) on veut donc indiquer une telle variation “si petite
que” les autres variables du système, qui dépendent éventuellement de x(ou de y,T,etc.), changeront de
façon linéaire si xvarie à l’intérieur de l’intervalle correspondant. La possibilité de traiter les problèmes de
ce point de vue “infinitésimal” est un des outils les plus puissants en physique. La raison est qu’elle permet,
justement, d’écrire des lois mathématiques pour décrire la dépendance réciproque des différentes grandeurs
physiques même la où l’on n’est pas capable d’écrire une simple fonction. La “physique” du système peut
cependant être toujours la même : elle est généralement décrite par une équation différentielle, reliant
entre elles les variations, donc les dérivées, des grandeurs physiques intéressantes.
Mais avant de revenir sur ce point, il nous est encore nécessaire de pouvoir traiter le cas où plusieurs
variables sont en jeu.
5.3 Les dérivées partielles : "
En général, les grandeurs physiques nécessaires pour décrire complètement un système sont nom-
breuses : on a plus que deux variables. Si une variable considérée dépend de plusieurs autres variables,
si elle est donc une fonction (connue ou inconnue) du type 3Y(X,Z,etc.)il faudra considérer sa variation
par rapport à toutes les variations possibles des autres variables. Dans ce cas, il est nécessaire d’utiliser les
dérivées partielles, qui donnent la variation de la fonction quand on fait varier une variable en tenant les
autres fixées. On pourrait se demander : fixées à quelle valeur ? Attention : comme la dérivée totale d’une
fonction Y(X)est encore une fonction de X, la dérivé partielle par rapport à X d’une fonction Y(X,Z,W)
est, en général, encore fonction de X, de Z et de W , ce qui veut dire qu’on peut la définir et la calculer pour
2On utilise parfois la notation y
"pour indiquer la dérivée dy
dx de ypar rapport à x. Il faut quand même faire attention à cette notation
car, dans le cas où ydépend de plusieurs variables, cette notation n’indique pas explicitement quelle est la variable par rapport à
laquelle on a dérivé (voir après dérivées partielles).
3On utilise ici des lettres capitales seulement pour différentier ce cas du cas d’un seul couple de variables, mais cela n’a aucune
signification physique : comme partout, on pourrait mettre à la place de ces x,X,yn’importe quelle grandeur physique.
5
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%