Slides de la présentation de Benoît Girard

CERNA - Apprentissage et Intelligence Artificielle:
les vraies questions éthiques
Apprentissages multiples,
substrats neuronaux et
modèles
Benoît Girard
ISIR
CNRS / UPMC

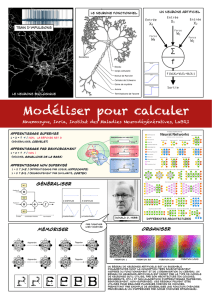
Les Apprentissages
❖3 grandes classes :
❖apprentissage supervisé
❖apprentissage non-supervisé
❖apprentissage par
renforcement

Les Apprentissages
❖Pour chaque action, un signal
d’erreur est produit indiquant
comment se corriger.
❖3 grandes classes :
❖apprentissage supervisé
❖apprentissage non-supervisé
❖apprentissage par
renforcement

Les Apprentissages
❖Aucun signal autre que
sensori-moteur,
❖Identification des régularités
statistiques du flux sensori-
moteur
❖3 grandes classes :
❖apprentissage supervisé
❖apprentissage non-supervisé
❖apprentissage par
renforcement

Les Apprentissages
❖Un signal de récompense/
punition est disponible
occasionnellement,
❖Longues séquences d’actions
sans information,
❖Pb : attribution des
responsabilités dans les
résultats obtenus
❖3 grandes classes :
❖apprentissage supervisé
❖apprentissage non-supervisé
❖apprentissage par
renforcement
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%