module 3 : solide et fluide en mouvement mise à niveau en

module 3 : solide et fluide en mouvement
mise à niveau en cinématique
Position d’un solide
Positionner un solide dans l’espace requiert :
— un point origine O ;
— un ou plusieurs axes à la fois gradués et orientés.
Cet ensemble est apellé un un repère d’espace . Pour simplifier l’étude, la position du solide sera celle de son
centre de masse .
Exemples :
La gare s’étale de −0,8à0,8 km. On prendra son centre de masse apellé O comme position. De la même
manière, on choisira le point M comme position du train malgré le fait qu’il va de x= 11 km àx= 13 km.
Centre de masse
Le centre de masse d’un solide est le point d’où nous noterons l’ensemble des forces s’exerçant sur lui. Nous
pourrons ainsi, pour les mouvements de translation, réduire le solide à un point situé au centre de masse.
Exemples :
Quel est le centre de masse de ces solides ?
1

Relativité du mouvement
Vidéo d’introduction : http://youtu.be/akLC_JMjpjA
La description d’un mouvement se fait toujours par rapport à un repère d’espace
Un même mouvement peut ainsi avoir trajectoire complètement différente dans un autre repère. Quelques
exemples en vidéos :
— Une valve de vélo fait une trajectoire circulaire par rapport au vélo, mais par rapport à la route, sa
trajectoire n’est plus du tout circulaire, mais cycloïdale : http://youtu.be/ck6FbMXSgL4.
— En mécanique céleste : http://youtu.be/rh1BReuU1vo
— Chute d’un corps : http://youtu.be/Fftar0rLi7Q
Composition des mouvements
Considérons un train noté « 1 » se déplacant par rapport au sol noté « 0 » selon −−→
u1/0. Une personne « 2 » se
déplace dans ce train selon le vecteur −−→
u2/1.
1
u1/0
u2/1
2
u2/0
1
u2/0
−−→
u2/0=−−→
u2/1+−−→
u1/0
Figure réalisée par Christophe Dang Ngoc Chan, CC BY-SA 3.0, Wikimedia Commons
Description d’un mouvement par chronophotographie
On peut représenter les différentes positions du solide en fonction du temps par chronophotographie :
©Hans Photomotion
Un repère d’espace et l’intervalle de temps entre chaque photographie permet de connaître la position du solide
en fonction du temps.
Référentiel
Un référentiel est l’association d’ :
— un repère d’espace ;
— un repère de temps (une horloge).
Un référentiel permet de connaître la position d’un solide à tout instant.
2

Mouvement dans l’espace
Mouvement unidimensionnel
Si le mouvement est contraint de suivre une courbe, la seule distance à l’origine permet de positionner le solide.
C’est un mouvement unidimensionnel.
Une seule valeur permet de positionner un train sur voie ferrée : le point kilométrique. Un train est en mouvement
unidimensionnel.
Mouvement bidimensionnel ou plan
Si le mouvement d’un solide est entièrement contenu dans un plan, on parle alors de mouvement plan. Un repère
d’espace à deux dimensions suffit alors pour relever ses positions.
Le mouvement d’un système piston-bielle-vilbrequin
s’inscrit dans un plan : c’est un mouvement plan.
Mouvement tridimensionnel
©Airplane-Pictures.net
Par défaut, il faut un trois valeurs pour positionner un solide dans l’espace. On se dote alors d’un repère d’espace
à trois dimensions.
Mouvement de translation
Si le solide se déplace parallèlement à un axe, il est en mouvement de translation.
Si la trajectoire est une droite, la translation est rectiligne, sinon, elle est curviligne.
3

La tige d’un verin effectue une translation rectiligne Le téléphérique effectue une translation curviligne
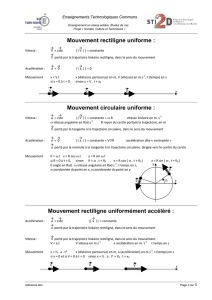
Vitesse
Vitesse moyenne
La vitesse moyenne d’un solide est donné par
vitessemoyenne =d´eplacement
dur´ee =positionfinale −positioninitiale
tempsfinal −tempsinitial
Pour un mouvement unidimensionnel, si on nomme xla position du solide dans l’espace, nous écrirons sous
forme algébrique
vmoy =∆x
∆t
Vitesse instantanée
La vitesse instantanée d’un objet est la vitesse qu’il a à un instant précis et non au cours d’un intervalle de
temps donné. Cette vitesse est obtenue en raccourcissant l’intervalle de temps entre les deux mesures de position
finale et initiale, jusqu’à ce que cet intervalle soit infiniment court. On a alors la vitesse instantanée à ce moment
précis.
v= lim
∆t→0
∆x
∆t
La vitesse instantanée est donc la dérivée de la position par rapport au temps :
v=dx
dt
La vitesse correspond à une distance sur une durée, elle s’exprime donc en mètres par seconde (m·s−1) dans le
système international.
mouvement uniforme
Un mouvement dont la vitesse est constante est apellé mouvement uniforme.
mouvement rectiligne uniforme
Un mouvement dont la trajectoire est une droite est un mouvement rectiligne.
Un mouvement dont la trajectoire est une droite et dont la vitesse est constante est donc un mouvement rectiligne
uniforme.
Accélération
Accélération moyenne
L’accélération correspond à la variation de vitesse sur la durée de cette variation :
acc´el´erationmoyenne =vitessefinale −vitesseinitiale
tempsfinal −tempsinitial
4

Nous écrirons sous forme algébrique
amoy =∆v
∆t
Exemple : Un corps passe de 20 m ·s−1à36 km ·h−1en 10 s. Quelle est la valeur de son accélération ?
36 km ·h−1= 10 m ·s−1. Ainsi, a= (10 −20)/10 = −1 m ·s−2.
L’accélération est négative. Cela signifie ici que l’objet est en décélération. Sa vitesse diminue.
Accélération instantanée
De la même manière que pour la vitesse instantanée, on peut définir l’accélération instantanée par
a= lim
∆t→0
∆v
∆t
La vitesse instantanée est donc la dérivée de la position par rapport au temps :
a=dv
dt
mouvement uniformément accéléré
Un mouvement dont l’accélération est constante est apellé mouvement uniformément accéléré.
Applications directes du cours, exercice
Je vous propose trois applications de cours et trois exercices pour appliquer ces notions de cinématique. Les
capacités mises en œuvre ne figurent pas au programme de BTS. Les capactités travaillées n’apparaissent donc
pas sur vos grilles.
Application directe de cours 3000
On a enregistré les différentes positions
d’un solide :
L’intervalle de temps entre deux positions successives est de 20 ms. L’origine du repère coïncide avec le premier
point M0 de l’enregistrement. L’échelle est de 1/1.
1. Déterminer la valeur de la vitesse à l’instant t= 40 ms
2. Déterminer la valeur de la vitesse à l’instant t= 100 ms.
3. Représenter les deux vecteurs vitesse correspondant à une échelle que vous préciserez.
4. Comment peut-on qualifier une telle trajectoire ?
5. Que peut-on dire de la nature du mouvement du solide?
6. Que peut-on dire de l’accélération du solide ?
5
 6
7
8
6
7
8
1
/
8
100%