Définition

1
Isabelle PUAUT
www.irisa.fr/caps/people/puaut/puaut.html
Option STR
Systèmes temps-réel
Master informatique – première année
Option STR – 2008-2009 2
Systèmes temps-réel embarqués
Définition
!Système embarqué : définition
"Fait partie d’un dispositif qui n’est pas un ordinateur
(système enfoui)
!En général
"Utilise de manière conjointe du matériel et du logiciel
pour mettre en œuvre une fonction spécifique
•Le logiciel est utilisé pour plus de flexibilité
•Le matériel (processeur, ASIC, DSP, mémoire) est
utilisé pour plus de performances
"Interagit fortement avec son environnement

Option STR – 2008-2009 3
Systèmes temps-réel embarqués
Caractéristiques générales
!Caractéristiques typiques
"Fonctions mises en œuvre spécifiques au domaine
d’application du système (pas généraliste - « general
purpose »)
"Complexité accrue des systèmes embarqués
•de plus en plus de besoins en performances et en
temps-réel
!Processeurs dédiés peuvent être des composants
clés (DSP, décodeurs matériels)
Option STR – 2008-2009 4
Systèmes temps-réel embarqués
Domaines d’application
!Produits de grande consommation
"Cafetière, machines à laver, fours à micro-onde
!Electronique grand public
"Caméras numériques, appareils photo numérique
"Multimédia, téléphonie : décodeurs vidéo,
téléphones portables, PDA, consoles de jeu
!Automobile
"Systèmes anti-blocage de freins,
contrôle moteur, informatique de confort
!Contrôle de procédés industriels
!Avionique, spatial, production d’énergie (nucléaire)
!Périphériques informatique : FAX, imprimantes
#Grande diversité des besoins (puissance, fiabilité, criticité)

Option STR – 2008-2009 5
Systèmes temps-réel embarqués
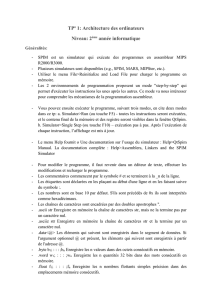
Exemple : sêche-linge
Option STR – 2008-2009 6
Systèmes temps-réel embarqués
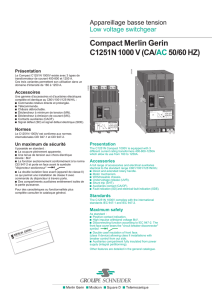
Exemple : automobile
!Evolutions des fonctions
logicielles dans l’automobile
(C. Balle, Journée Illiatech,
octobre 2001)
!Système antiblocage (ABS)
(site Web motorola :
www.motorola.com)

Option STR – 2008-2009 7
Systèmes temps-réel embarqués
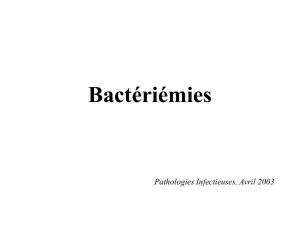
Exemple : téléphone portable
!Plate-forme I.250 Motorola pour téléphones cellulaires
(site Web motorola : www.motorola.com)
Option STR – 2008-2009 8
Systèmes temps-réel embarqués
Le marché de l’embarqué
!A l’heure actuelle
"Processeurs embarqués / microcontrôleurs : 31 M$ par an
"Processeurs généralistes : 46 M$ par an
!Evolutions du marché
"Processeurs embarqués : + 18 % par an
"Processeurs généralistes : + 10 % par an
!Prévisions : le marché de l’embarqué va dépasser celui des
processeurs généralistes dans la décennie
"Complexité des codes et des architectures croissantes
(R. Gupta, UC Irvine, cours « embedded systems »)

Option STR – 2008-2009 9
Systèmes temps-réel embarqués
Contraintes de conception (1/2)
!Temps-réel
"Le temps réel (physique) entre dans le critère de
correction des applications
"Besoin de garanties sur le respect de contraintes
temporelles (prévisibilité)
!Sûreté de fonctionnement
"Définition : capacité à placer une confiance justifiée dans
le service
"Entraves : défaillances provenant de fautes
"Moyens pour la sûreté de fonctionnement (prévention des
fautes, tolérance aux fautes, prévision des erreurs)
"Large gamme de méthodes selon le type de fautes et la
criticité des applications (matériel, logiciel)
"Systèmes critiques : certification
Option STR – 2008-2009 10
Systèmes temps-réel embarqués
Contraintes de conception (2/2)
!Coût
"Coût (temps) de conception (time-to-market).
"Coût d’achat : surface de silicium
•Ressources limitées (mémoire)
•Energie limitée (coût des batteries)
"Processeurs moins élaborés (plus simples) dans
l’embarqué que les processeurs généralistes (coût +
prévisibilité)
"Ergonomie : contrainte de poids
!Lien entre toutes ces contraintes
"Ex : besoin en performance vs temps-réel et
consommation
"Exploration multi-critères pour les choix matériel - logiciel
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
1
/
146
100%