La Quantification des Signaux - Faculté Polytechnique de Mons

Chapitre 2
La Quantification des Signaux
Notes de Cours.
B. Gosselin
2.1 Introduction
La représentation numérique d’un signal implique la quantification de chaque échantillon selon
un nombre fini de valeurs discrètes. L’objectif visé est, soit une transmission, soit un traitement
déterminé (filtrage, analyse spectrale,…) :
• Dans le premier cas, chaque échantillon du signal est quantifié, codé, puis transmis; à la
réception, il est décodé, puis converti en amplitude continue : après interpolation, on souhaite
retrouver l’image la plus fidèle possible du signal original. La statistique du signal doit donc être
préservée : elle va influencer d’une façon essentielle la procédure de quantification.
• Dans le second cas, la loi de quantification est imposée par le système de traitement ; une
contrainte importante pour un système de traitement numérique consiste à commettre des erreurs
de calcul qui soient négligeables vis-à-vis de l’incertitude sur le signal lui-même ; cet objectif doit
être atteint malgré le caractère non - stationnaire de certains signaux, tel le signal vocal par
exemple.
L’erreur qui résulte de la quantification d’un signal déterministe est aussi déterministe ; ses
propriétés peuvent donc, en principe, être établies par une approche déterministe. En réalité, les
signaux tels que, par exemple, le signal vocal, doivent être considérés comme étant aléatoires : la
suite des erreurs de quantification est par conséquent aussi aléatoire, et l’on parle alors de bruit de
quantification. Il est très important d’en connaître les propriétés statistiques, tout au moins celles
des premier et second ordre, c’est-à-dire :

La Quantification des Signaux
Copyright © 2002 Faculté polytechnique de Mons – B. Gosselin
2
• la densité de probabilité
(
)
epe;
• la moyenne e
µ;
• la variance 2
e
σ;
• la fonction d’autocovariance
(
)
k
ee
φ;
• la covariance mutuelle avec le signal
(
)
k
ex
φ;
• le rapport signal à bruit RSB.
Considérons un signal
(
)
tx à temps continu et à bande limitée
[
]
BB +− ,. Lorsqu’on
l’échantillonne à une fréquence supérieure ou égale à la fréquence de Nyquist Bfe2=, on obtient,
sans perte d’information, un signal à temps discret
(
)
nx . On interprétera ce signal comme un
processus aléatoire à temps discret
(
)
nX . On suppose que ce processus aléatoire possède les
bonnes propriétés habituelles de stationnarité et d’ergodicité. A la sortie du quantificateur, ce
processus devient un processus aléatoire à valeurs discrètes, c’est à dire que
(
)
XQY = prend ses
valeurs dans un ensemble fini de L éléments.
Une loi de quantification sans mémoire, ou instantanée, est définie par :
• (L+1) niveaux de décision : L
xxx
⋯
,, 10 ;
• L valeurs quantifiées : L
yyy
⋯
,, 21 .
A toute amplitude Xcomprise dans l’intervalle
[
]
ii xx ,
1−, on fait correspondre une valeur quantifiée
i
y située dans cet intervalle :
i
yY =si
[
]
ii xxX ,
1−
∈pour Li ,,2,1
⋯
=
(2.1)
Les amplitudes extrêmes du signal sont en principe −∞=
0
x et +∞=
L
x; en fait, le domaine de
variation de x est borné et supposé symétrique par rapport à l’origine. On a donc max0 xx −= et
max
xxL+= .
La valeur quantifiée de sortie peut également être représentée au moyen d’un mot,
généralement au format binaire, choisi parmi les L que contient un dictionnaire. Ainsi, par exemple,
lorsque le nombre de valeurs quantifiées est une puissance de 2, soit b
L
2
=
, chaque valeur
quantifiée peut être représentée par un mot de b bits, en codant les indices de référence de ces
valeurs.
La loi de quantification
(
)
xQ peut affecter deux formes :
• L est pair et 0
=
x est un niveau de décision (midrise characteristic) ;
• L est impair et
0
=
y
est une valeur de sortie (midthread characteristic) ;

La Quantification des Signaux
Copyright © 2002 Faculté polytechnique de Mons – B. Gosselin
3
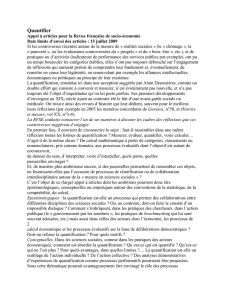
Ces caractéristiques sont représentées à la figure 2.1, qui illustre également l’erreur de quantification
(
)
xxQe −= . La seconde caractéristique, qui assure une valeur quantifiée insensible aux petites
fluctuations éventuelles autour de l’origine, est en général préférée.
La différence entre deux niveaux de quantification successifs est appelée pas de
quantification :
1−
−=∆ iii xx (2.2)
Le pas de quantification est en général fonction de l’amplitude du signal (quantification non
uniforme). Le cas le plus simple est celui de la quantification uniforme.
y
x
x(2)
x(1) x(3)
y(8)
x(7)x(6)x(5)
y(2)
y(3)
y(7)
y(6)
y(1)
e = y - x
x
y
x
x(2)x(1) x(3)
y(9)
x(6)x(5)x(4)
y(2)
y(3)
y(8)
y(7)
y(1)
e = y - x
x
Figure 2.1 - Exemples de lois de quantification.
La statistique du bruit de quantification
(
)
ne est relativement aisée à déterminer lorsque le
signal est aléatoire et de grande amplitude, c’est-à-dire lorsqu’à la fois son écart-type et la différence
entre deux échantillons successifs sont grands vis-à-vis du pas de quantification. Les propriétés qui
correspondent à la quantification d’un bruit blanc continu gaussien de variance finie lorsque le pas de
quantification tend vers zéro sont appelées propriétés asymptotiques. Ces dernières ne sont
toutefois pas valables pour les signaux aléatoires dont l’amplitude est de l’ordre de grandeur du pas
de quantification, et une analyse mathématique précise de la quantification est dans ce cas
indispensable.

La Quantification des Signaux
Copyright © 2002 Faculté polytechnique de Mons – B. Gosselin
4
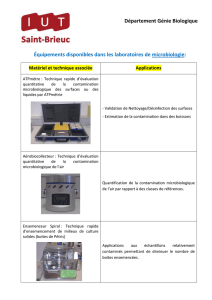
2.2 Quantification Uniforme
Une loi uniforme et symétrique (figure 2.2) est caractérisée par :
• Les niveaux de saturation s
x±;
• Le nombre de niveaux quantifiés L; on choisi normalement L (ou L+1) = b
2
.
Le pas de quantification
∆
vaut alors : L
xs
2
=∆ , (2.3)
et la valeur quantifiée i
y est choisie au milieu de l’intervalle i:2
1ii
i
xx
y
+
=− (2.4)
x(1)
-xs
xs
x(2)
x(8)
x(3) x(4)
x(5) x(6) x(7)
y(1)
y(4)
y(6)
y(7)
y(8)
y(9)
y(2)
y(3)
y
x
x
e = y - x
∆
/2
-
∆
/2
Figure 2.2 - Loi de Quantification Uniforme.
• Pour 2
∆
⋅
=≤ L
xx s, l’erreur de quantification est comprise entre 2
∆
− et 2
∆
+:
2
∆
≤⇒≤≤− exxx ss (2.5)
On parle dans ce cas d’erreur (ou de bruit) de granulation.
• Lorsque s
xx >, Il y a dépassement ; on parle alors d’erreur (ou de bruit) de saturation ou de
dépassement.

La Quantification des Signaux
Copyright © 2002 Faculté polytechnique de Mons – B. Gosselin
5
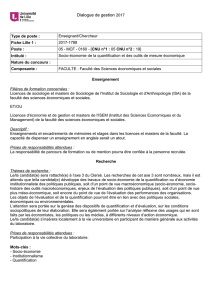
Erreur de granulation
Soit un signal x, dont la densité de probabilité
(
)
xpx est Gaussienne, d’écart-type x
σ(figure
2.3). L’aire hachurée définit la probabilité pour que les amplitudes de x contribuent à la valeur
quantifiée k
y, soit :
2
2
∆
+<≤
∆
−kk yxy (2.6)
px
xyk
Figure 2.3 - Quantification d’un signal Gaussien.
La densité de probabilité
(
)
epe de l’erreur de granulation peut être obtenue par la superposition de
telles aires ramenées entre 2
∆
− et 2
∆
+:
(
)
(
)
(
)
∑
∆
⋅+=
k
kxe erecteypep 2/ (2.7)
où la fonction
(
)
erect 2/∆ est définie par :
(
)
ailleurs
rect
,0
,1
=
α<τ≤α−=τ
α (2.8)
On conçoit aisément que lorsque le rapport
∆
σ
x tend vers l’infini, la loi (2.7) tende vers une
répartition de moyenne nulle, et uniforme entre 2
∆
− et 2
∆
+ (
∆
σ
x> 3 ou 4 est considéré comme
suffisant en pratique). Si la probabilité de dépassement est négligeable, on a donc :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%