Un Modèle à Base de Règles d`Associations Spatio

Un Modèle à Base de Règles
d’Associations Spatio-temporelles
pour la Prédiction de l’évolution
Territoriale
Asma GHARBI 1, Cyril DE RUNZ 2, Sami FAIZ 3,
Herman AKDAG 1
1. LIASD, Université de Paris 8, Saint-Denis, France
{ asma.gharbi,akdag}@ai.univ-paris8 .fr
2. CReSTIC University of Champagne-Adrenne, Reims, France
cyril.de-runz@univ-reims.fr
3. LTSIRS, Université de La Mannouba, Tunis
sami.faiz@insat.rnu.tn
RÉSUMÉ. Dans cet article, nous partons de l’hypothèse que les dynamiques spatiales
et les usages des objets géographiques peuvent, en partie, être anticipés par leurs histo-
riques de changements de fonctions et de co-localisations. Ainsi nous proposons d’ex-
ploiter la recherche des motifs fréquents et des règles d’associations, pour en extraire
les règles régissant ces dynamiques. Ce travail tente également d’adapter le processus
de fouille pour tenir compte de la spécificité des données spatio-temporelles utilisées,
en particulier, leur asymétrie.
ABSTRACT. In the present article we start from the hypothesis that spatial dynamics
and geographic objects’ use can, partially, be anticipated by their functions and co-
locations’ changes. Hence, we suggest mining frequent patterns and associations, in
order to derive rules governing these dynamics. Our work, attempts, equally, to adapt
the mining process in order to deal with our spatio-temporal data specificities, in par-
ticular, their asymmetric aspect.
MOTS-CLÉS : Règles d’Association, Dynamiques Spatiales, Prédiction, Règles d’asso-
ciation de classification
KEYWORDS: Association Rules, Spatial Dynamics, Prediction, Class Association rules
SAGEO’2016 - Nice, 6-9 décembre 2016

2 SAGEO’2016
1. Introduction
Un territoire évolue, se bâtit et se transforme au fil du temps. Ainsi, nos
sociétés ont besoin d’outils permettant d’estimer, voire de prédire, quelles seront
les évolutions futures de nos territoires (urbains, rurales, etc.). Les modèles
sous-jacents à ces outils permettront, éventuellement, de tester des hypothèses
et envisager leur possible répercussion en termes d’aménagement.
Un large panel de travaux, se basant sur la fouille de données spatio-
temporelles pour traiter la question des changements d’occupation/usage du
sol, ont été proposés (Jenerette, Wu, 2001 ; Yang et al., 2008 ; Charif et al.,
2012 ; Malek et al., 2015 ; Qiang, Lam, 2015). La plupart de ces travaux visent
essentiellement à identifier et à caractériser ces changements ainsi qu’à décou-
vrir les relations qu’ils ont avec les différents variables naturelles et anthropo-
géniques. Bien qu’efficace, cette approche est spécifiques au type de couverture
suivi (e.g. végétations, bâti), se concentre sur les caractéristiques internes des
zones étudiées et néglige les relations spatiales et temporelles des données (i.e.
une telle propriété apparait à une telle co-localisation à un tel moment). L’ap-
proche que nous proposons dans ce papier, tente, en partie, de répondre à
ces problématiques. Effectivement, elle se concentre sur les relations spatio-
temporelles entre les entités géographiques qui, à l’encontre de quelques va-
riables très spécifique au domaine d’application ou au type d’occupation du sol
suivi, sont toujours présentes et valides, d’où sa généricité.
Concrètement, nous proposons d’explorer la dépendance entre les variables
décrivant l’historique de l’évolution d’un certain objet spatio-temporel (re-
lations temporelles de succession d’occupation), l’historique de ses co-locali-
sations (relations spatiales de voisinage) et sa future occupation du sol ou évo-
lution d’usage. Ceci correspond à une tâche courante de fouille de données : la
recherche de règles d’association. Dans cet article, nous proposons, également,
d’adaptater le processus de fouille à travers la modification de Apriori (Agrawal
et al., 1993), un algorithme fondamentale et largement utilisé. Cette modifica-
tion, vise essentiellement, à tenir compte de la spécificité des données spatio-
temporelles, en particulier, leur asymétrie.
La section 2 fournit un aperçu de la recherche de règles d’association ainsi
que du processus de fouille employé dans l’algorithme Apriori. La section 3
décrit notre proposition pour adapter ce processus au contexte spatio-temporel
de notre problème. Enfin, les conclusions et perspectives sont exposées dans la
dernière section.
2. Les règles d’association
Dans le domaine de la fouille de donneés, la recherche de règles d’association
représente une tâche fondamentale et courante. Son objectif est de découvrir
des relations ou structures (associations), statistiquement intéressantes, entre

Prédiction de l’évolution territoriale 3
deux ou plusieurs variables stockées dans des grandes bases de données qui sont,
généralement, transactionnelles. La définition formelle d’une règle d’association
peut être énoncée comme suit :
Soit Dune base de transactions et T(T={t1,t2,t3, . . . , tn}) un ensemble
de transactions dans D, composé par un ensemble d’item I={i1,i2,i3, ..., ix}
tel que ti⊆I.
Une règle d’association représente l’implication de la forme suivante: X−→ Y.
Xet Ysont deux ensembles d’items, appelés itemsets;X,Y⊂I; et X∩Y=
∅.
Depuis son introduction par (Agrawal et al., 1993), la recherche de règles
d’association fut un domaine de recherche très actif. Mis à part sa capacité
à capturer les relations et structures incorporées dans les données d’appren-
tissage, cette méthode présente plusieurs atouts tels que son exhaustivité en
termes de génération de règles ou de motifs fréquents, sa simplicité, son intui-
tivité et sa capacité à gérer le problème de démarrage à froid posant souvent
problème aux autres approches de la fouille de données (p.ex. classification).
L’utilisation d’un seuil de fréquence (support) garantit la capture des associa-
tions tant que l’on dispose d’une quantité suffisante de données même si elle est
restreinte. Cette méthode de fouille de données a également évoluée, au fil des
années, pour supporter d’autres types de données – spatiales, temporelles cy-
cliques ou séquentielles, quantitatives et floues – et donc produire des règles plus
complexes – règles spatio-temporelles, règles multi-dimensionnelles, floues – et
traiter d’autres types de problèmes – classifications, partitionnement, detection
d’anomalies, detection d’évènement – (Han et al., 2007).
Apriori est l’un des premiers algorithmes proposés et est très couramment
utilisé. Cet algorithme adopte une heuristique qui se base sur la connaissance
a priori de l’information sur la fréquence des items. La fréquence d’un item ou
d’un itemset (Support) est évaluée à travers son nombre d’occurences dans la
base. Un item ou un itemset est dit fréquent si son nombre d’occurences dans la
base dépasse un seuil, spécifié par l’utilisateur, dit support minimal (minsup).
Afin d’identifier les itemsets fréquents pour en construire les règles d’asso-
ciation, l’algoritme effectue plusieurs balayages de la base d’apprentissage (voir
algorithme ??). En effet, il procède en deux étapes :
– Une étape de génération d’itemsets fréquents utilisant une fonction de
jointure pour générer des itemsets candidats (candidGen) et une fonction d’éla-
gage pour ne garder que les candidats fréquents. La jointure se fait en liant la
liste d’itemsets fréquents d’ordre directement inférieur à lui même (e.g. Les
candidats de cardinalité 3 est obtenu à partir d’une jointure sur les itemsets
fréquents de cardinalité 2).
– Une étape de génération de règles d’association à partir des itemsets (en-
semble d’items) fréquents trouvés. Pour chaque itemset fréquent fApriori iden-

4 SAGEO’2016
tifie tout ses sous-ensembles non vides set génère, pour chacun, une règle de
la forme :
s−→ (f−s)
De nombreuses extensions, proposées dans la littérature (Hipp et al., 2000),
visent à améliorer sa performance et produire des règles plus complexes. C’est
dans cette dynamique que nous nous inscrivons afin d’exploiter l’essence d’Apriori
pour l’extraction de règles spatiotemporelles.
Algorithme 1 : Le pseudo code le l’algorithme Apriori
1Données : D;
2Ck: Liste d’itemsets candidats de taille k;
3Lk: Liste d’itemsets fréquents de taille k;
4L1=les items fréquents
5pour (k = 1;Lk! = ∅; k++) faire
6Ck+1 = candidats générés à partir de Lk;
7pour chaque transaction t dans D faire
8Incrémenter le décompte de chaque candidat de Ck+1 contenu
dans t ;
9Lk+1= les candidats dont le support dépasse le seuil minsup ;
10 Résultat : ∪kLk;
3. Notre Proposition
Dans cette section, nous exposons notre approche pour la génération de
règles permettant la prédiction de l’évolution d’une zone géospatiale. Dans ce
contexte nous proposons quelques modifications à l’algorithme de recherche de
règles d’association Apriori afin d’adapter son processus de fouille à notre pro-
blème. Notre objectif est d’explorer l’applicabilité des règles d’association pour
souligner l’effet des relations spatio-temporelles sur l’évolution d’un territoire.
Il convient de noter que cette approche supporte deux contextes d’applica-
tions :
– La modélisation de la nature physique des entités qui représentent des
portions de terrain.
– La modélisation de la fonction socio-économique et environnementale des
entités associées, généralement, à du bâti.
3.1. Cadre Conceptuel
Dans ce travail, nous adoptons la conceptualisation de l’espace comme sup-
port (Pradeau, 1996). En d’autres termes, un cadre de référence où on localise

Prédiction de l’évolution territoriale 5
des objets et on envisage leurs relations en se basant, principalement, sur le
critère de distance. Dans cette conception, l’espace est indépendant des fac-
teurs externes (absolu), et ses propriétés (e.g. conditions géo-climatiques) sont
homogènes et isotropes (sont les mêmes dans toutes les directions).
Les entités géographiques sont caractérisées par leurs fonctions (i.e. occupa-
tion/usage du sol). Elles sont reliées par deux types de relations : les relations
spatiales de voisinage et les relations temporelles définies par la succession
chronologique des fonctions d’un même objet géographique.
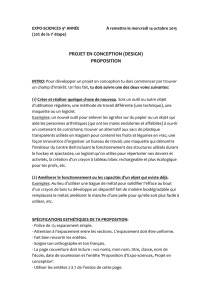
Pour la modélisation de l’évolution d’un objet géographique physique, nous
adoptons le paradigme identitaire de (Cheylan, Lardon, 1993). Ce dernier, se
focalise sur le concept de l’entité géographique. Il considère qu’elle correspond
à un atome qui représente les attributs sémantiques et spatiaux d’un objet
physique à un moment donnée. Selon ce même paradigme, la vie d’un objet
géographique est reconstituée par la projection, sur l’axe temporel, de la suite
des atomes (entitées) appartenant à cet objet (cf. figure 1.a).
3.2. Données d’apprentissage
Dans ce travail, nous proposons d’utiliser comme cas d’application les don-
nées Corine Land Cover (CLC) concernant le département 93 (Seine Saint-
Denis) en France. CLC est une base de données d’occupation biophysique du
sol sur le territoire européen. Diffusée par l’Agence européenne de l’environne-
ment (AEE), les données CLC sont disponibles pour quatre dates différentes
(1990, 2000, 2006 et 2012 ) formant ainsi quatre cartes géographiques au format
vectoriel.
La première étape dans la recherche de règles d’association consiste à propo-
ser un format de représentation des données, adéquat à la génération de règles
cibles. En effet, nos instances d’apprentissage correspondent aux trajectoires de
vie de l’ensemble d’objets formant un territoire ; et nos règles cibles devraient
porter, dans la partie condition, sur l’historique de changement de fonction et
de co-localisation d’un objet géographique et dans la partie conclusion sur sa
probable fonction future. Dans ce contexte, une trajectoire de vie d’un certain
objet géographique (l’objet E3 dans la figure 1.a) est représentée sous la forme
d’une transaction constituée par :
– Un item représentant l’attribut (SPF). Il correspond à la séquence de
fonctions des entités modélisant son évolution jusqu’à son état actuel (séquence
d’évolution). La figure 1.a représente un exemple d’une trajectoire de vie. Le
SPF, dans cet exemple, est représenté par la séquence composée par les fonc-
tions f1,f2et f3correspondant, respectivement, aux entités E1,E2,E3(E1et
E2les versions anciennes, E3la version actuelle).
– Un item ou un ensemble d’items représentant l’attribut (N). Ceux-ci cor-
respondent aux fonctions des voisins de chaque entité impliquée dans la sé-
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%