Chap 9

Sirius Term S - Livre du professeur
Chapitre 9. Lois de Newton
© Nathan 2012 8 / 33
Réponses
1. Observer
L’observation se fait sur les courbes x(t) projeté du point B sur l’horizontale et y(t) projeté
de B sur la verticale. Les élèves doivent interpréter les variations de x et y pendant des durées
successives égales.
Projeté de B sur l’horizontale
Projeté de B sur la verticale
Situation
vitesse
nature du
mouvement
vitesse
nature du
mouvement
La balle s’élève
en altitude
constante
uniforme
diminue
augmente
La balle
redescend
constante
uniforme
décéléré
accéléré
2. Analyser
a. Le référentiel d’étude est le référentiel terrestre.
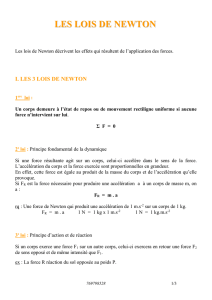
b. et c. On obtient vx(t) et vy(t) par dérivation numérique par rapport à t de x(t) et y(t) (points
rouges et bleus sur le graphique suivant).
Les valeurs vx(t) sont pratiquement égales ; le mouvement est uniforme selon l’axe horizontal.
Les points représentatifs de vy(t) sont alignés : vy(t) est une fonction affine du temps.
L’accélération ay(t) =
d
dy
v
t
est une constante. L’accélération ay(t) du mouvement du projeté
de B sur l’axe (O,
j
) est donc constante et le mouvement est uniformément varié selon cet
axe.
d. - Mouvement du projeté de B sur l’horizontale : on retrouve que vx(t) est constant.
- Mouvement du projeté de B sur la verticale : de t = 0 à t = 330 ms, on a vy(t) > 0 ; le
mouvement se fait dans le sens positif de l’axe (vers le haut), mais vy(t) diminue, le
mouvement est donc décéléré dans cette phase.
Pour
330t
ms, on a vy(t) ≤ 0, le mouvement du projeté de B sur l’axe (O, j) se fait dans le
sens négatif de l’axe et la valeur de la vitesse |vy(t)| augmente. Dans cette phase le mouvement
est donc accéléré.

Sirius Term S - Livre du professeur
Chapitre 9. Lois de Newton
© Nathan 2012 9 / 33
3. Interpréter
a. vx(t) peut être modélisée par une droite d’équation : vx1 = vox = 1,23 ms-1 (droite notée vx1
sur le graphique ci-dessus).
vy(t) peut être modélisée par une droite : vy1 = ayt + voy = -9,63t + 3,23 donc voy = 3,23 ms-1
(droite notée vy1 dans le graphique ci-dessus).
vox et voy représentent les coordonnées du vecteur vitesse à la date du lancement.
b. On obtient les coordonnées du vecteur accélération en dérivant par rapport au temps les
expressions de vx1 et de vy1 : ax(t) = 0 et ay(t) = -9,63
Le vecteur accélération est donc vertical, de sens vers le bas et de valeur constante :
a = 9,63 m·s-2
c. La deuxième loi de Newton appliquée à la balle dans le champ de pesanteur terrestre
uniforme entraîne :
ag
. On retrouve bien les caractéristiques du vecteur accélération avec
un écart relatif sur la valeur de l’accélération de 2 %.
4. Conclure
Dans le champ de pesanteur uniforme, le mouvement du projeté d’un point matériel sur la
direction horizontale est uniforme de vitesse vx = vox ; alors que le mouvement du projeté de
ce point dans la direction verticale est uniformément varié, d’accélération
ag
.

Sirius Term S - Livre du professeur
Chapitre 9. Lois de Newton
© Nathan 2012 10 / 33
Activité expérimentale 4. Électrons dans un champ électrique
Commentaires
L’objectif principal de cette activité est l’appropriation par les élèves des liens entre champ
électrique et mouvement d’une particule chargée (accélération et déviation). Cette activité, se
réalise à partir d’une photographie qui peut être réalisée en classe ; elle permet d’étudier plus
directement et complètement un dispositif et une expérience qui sont traditionnellement
présentés au bureau.
Dans cette activité, les élèves analysent dans un premier temps le dispositif expérimental et,
dans un deuxième temps, l’image de la trajectoire du faisceau d’électrons, après avoir réalisé
l’acquisition d’un ensemble de points avec un logiciel de pointage sur image.
Le traitement des données est ensuite réalisé avec un logiciel connu des élèves.
L’écart entre le modèle théorique et le modèle expérimental amène à discuter des hypothèses
qui ont été choisies pour élaborer le modèle théorique : la compétence valider est donc ici tout
particulièrement travaillée.
Réponses
1. Analyser le dispositif
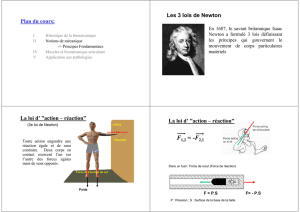
Le canon à électrons
a et b. Les caractéristiques de la force électrique
f
qui s’exerce
sur un électron, de son accélération
a
et du champ
E
sont
représentées sur le schéma ci-contre.
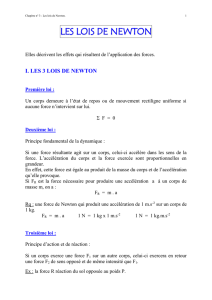
Le dispositif de déviation du faisceau d’électrons
a et b. En tenant compte du sens de la déviation du faisceau
d’électrons, on établit les caractéristiques de la force électrique
'f
qui s’exerce sur un électron, de son accélération
a
et du
champ
'E
. Les caractéristiques de la force électrique, du champ
et de l’accélération de l’électron sont représentées sur le schéma
ci-contre.
2. Exploiter puis conclure
Les résultats présentés ci-dessous ont été obtenus avec la photographie disponible sur le site
compagnon.
Nous avons choisi un repère orthonormé, d’axe horizontal (O,
i
) orienté positivement vers la
droite et d’axe vertical (O,
j
) orienté positivement vers le haut.

Sirius Term S - Livre du professeur
Chapitre 9. Lois de Newton
© Nathan 2012 11 / 33
Copie d’écran obtenue à la fin du pointage réalisé sur la photographie agrandie en utilisant
le logiciel Regavi.
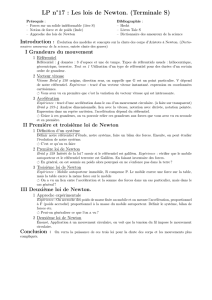
Représentation en rouge du relevé du pointage et de la courbe modélisée passant par les
points ymodèle(x) et en bleu de la courbe théorique ytheo(x).

Sirius Term S - Livre du professeur
Chapitre 9. Lois de Newton
© Nathan 2012 12 / 33
Sur la représentation précédente, on note l’écart entre la courbe expérimentale (en rouge) et la
courbe théorique (en bleu). Celle-ci s’appuie sur les hypothèses suivantes :
- champ électrique uniforme et limité à la seule zone intérieure au condensateur plan,
- valeur v0 de la vitesse identique à celle en sortie du canon.
On note que la tangente en O à la trajectoire (courbe en rouge) n’est pas horizontale, donc que
les électrons ne pénètrent pas dans l’espace du condensateur avec la direction de l’axe x’x. Ils
ont été déviés par un champ électrique existant au voisinage du condensateur.
Équations de la courbe :
- théorique : ytheo = -4,8x² ;
- expérimentale : ymodèle = -4,12x² + 0,094x.
Remarque : l’expérience est réalisée avec la même tension U entre les plaques accélératrices
AB et de déviation A’B’. Dans le canon à électron, la valeur
0 v
de la vitesse de sortie est
obtenue avec :
2
0
1
2mv eU
En notant
'
0
v
la valeur de la vitesse d’entrée des électrons entre les plaques A’B’ de déviation,
α l’angle d’entrée, l’équation de la trajectoire est :
2
'2 2
0
1 tan α
2 cos
e U x
yx
m d v
En éliminant U et m on obtient :
2
20
'2 2
0
tan α
4 cos
v
x
yx
dv
La comparaison avec les valeurs de la modélisation donne, en appelant K le rapport des
vitesses :
2
1
4,12 4 cos α
K
d
0,094 tan α
On trouve un angle de 5,4° et un rapport
0
'
0
0,92
v
Kv
.
Ces résultats montrent que le champ entre les deux plaques de déviation n’est certainement
pas nul au voisinage de la zone d’entrée des électrons : déviation du faisceau avant l’entrée et
modification de la vitesse entre les deux systèmes accélérateur et de déviation.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
26
100%