I. Moment cinétique

LOI DU MOMENT CINÉTIQUE
Quand on tourne le volant d’une voiture, on exerce deux forces opposées en deux points dia-
métralement opposés. D’après la loi de la quantité de mouvement on vérifie que le centre de
masse du système ne se déplace pas. Pourtant, le fait d’exercer ce "couple" de force permet de
mettre en mouvement le volant. Le mouvement va donc être décrit par une nouvelle loi, bien
adaptée à l’étude des mouvements de rotation : la loi du moment cinétique.
I. Moment cinétique
1. Moment cinétique d’un point matériel par rapport à un point
a) Définition
Soit Mun point matériel se déplaçant à la vitesse v dans un référentiel R. Soit Aun point quel-
conque. On définit σA(M)/Rle moment cinétique du point Men Apar rapport au référentiel
R
σA(M)/R=−−→
AM ∧p(M)/R=−−→
AM ∧mv(M)/R
b) Propriété
σB(M)/R=−−→
BM ∧p(M)/R
= (−→
BA +−−→
AM)∧p(M)/R
=−→
BA ∧p(M)R+σA(M)/R
σB(M)/R=σA(M)/R+−→
BA ∧p(M)R
Dimensionnellement [kσk] = M.L2.T −1( kg.m2.s−1en unité SI). On peut remarquer que ces
dimensions sont les mêmes que celles de la constante de Planck h1.
Autre écriture courante : le moment cinétique σA(M)/Rest fréquemment noté
LA(M)/R.
Pour alléger l’écriture on ne précisera plus par la suite le référentiel d’étude Rdans la notation.
1. p=
h
λ, avec λla longueur d’onde de de Broglie
1

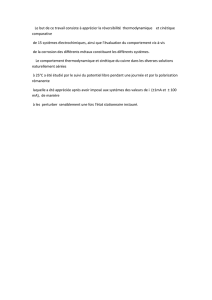
2. Moment cinétique d’un point matériel par rapport à un axe orien-
té
Soit un axe ∆.
Soit Oun point quelconque de ∆.
Soit u∆un vecteur unitaire colinéaire à l’axe ∆.Le
sens de ~u∆définit l’orientation de l’axe ∆.
On définit σ∆(M)le moment cinétique de Mpar rap-
port à l’axe orienté ∆, dans un référentiel Rdonné
par
σ∆(M) = σO(M).u∆
Quelques remarques :
Le signe de σ∆dépend du sens d’orientation choisi.
La définition est indépendante de la position du point Ochoisi sur l’axe.
Soit O0∈∆tel que
OO06=
0.
D’après la propriété établie précédemment σO0(M) = σO(M) + −−→
O0O∧p(M), d’où
σO0(M).u∆=σO(M).u∆+ (−−→
O0O∧
p(M)).u∆
| {z }
=0 car −−→
O0Ok~u∆
=σO(M).u∆=σ∆
Seule la composante orthoradiale vθde la vitesse contribue au moment cinétique par rapport
à l’axe.
Plaçons nous en coordonnées cylindriques : l’axe Oz est confondu avec l’axe ∆,uz=u∆.
(−−→
OM =rur+zuz
v = ˙rur+r˙
θuθ+ ˙zuz=vrur+vθuθ+vzuz
−−→
OM ∧mv =m
r
0
z
∧
vr
vθ
vz
=m
−z vθ
z vr−rvz
r vθ
ainsi par projection σ∆=σO(M).u∆=σO(M).uz=mr vθ=rpθ=mr2˙
θavec pθ=p.uθ
composante orthoradiale de la quantité de mouvement.
σ∆=r pθ=rmvθ=mr2˙
θ
2

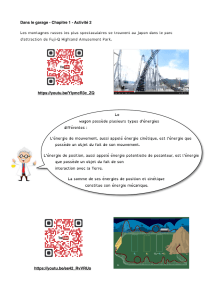
On a tracé sur les figures ci-dessous uniquement la composante orthoradiale de la vitesse
Pour ˙
θ > 0,vθ=r˙
θ > 0, le point Mtourne autour de l’axe ∆dans le sens direct σ∆>0.
Pour ˙
θ < 0,vθ=r˙
θ < 0, le point Mtourne autour de l’axe ∆dans le sens indirect σ∆<0.
Le sens direct (sens positif) est lié à l’orientation de l’axe ∆par la règle du tire-bouchon.
Le moment cinétique sera nul si vθ= 0. Dans ce cas le vecteur vitesse v est contenu dans le
plan défini par Met l’axe ∆.
3

3. Moment cinétique d’un système de points par rapport à un axe
orienté
On considère un système Sde points matériels Mide masse de miavec i= 1 . . . n. Le moment
cinétique en Odu système, par rapport à un référentiel Rdonné est la somme des moments
cinétiques de chacun des points.
σO=
n
X
i=1
σO(Mi) =
n
X
i=1
−−→
OMi∧miv(Mi)
Par projection, le moment cinétique du système Spar rapport à un axe ∆orienté sera
σ∆=σO.u∆=
n
X
i=1
σO(Mi).u∆=
n
X
i=1
σ∆(Mi)
En se plaçant en coordonnées cylindriques de telle sorte que l’axe ∆soit confondu avec Oz, on
aura :
σ∆=
n
X
i=1
mir2
i˙
θi
où rireprésente la distance du point Mià l’axe ∆.
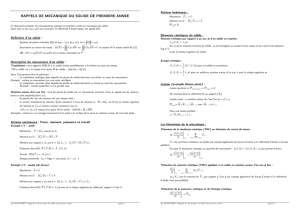
4. Cas du solide en rotation autour d’un axe fixe
On considère un solide Σen rotation à la
vitesse angulaire ω=˙
θdans le sens direct
autour d’un axe ∆fixe dans le référentiel
d’étude R. Chaque point de Σdécrit dans R
une trajectoire circulaire d’axe ∆à la même
vitesse angulaire ω.
∀i˙
θi=˙
θ=ω
D’après le résultat précédent, si on décompose le solide en un grand nombre de points, le
moment cinétique de Σpar rapport à l’axe ∆vaudra σ∆= X
i
mir2
i!˙
θ= X
i
mir2
i!ω.
En réalité, chaque "point" correspond à un volume élémentaire de masse dmet la sommation
n’est pas discrète mais continue, ce qui revient à poser une intégrale.
σ∆=ZZZΣ
dm r2ω=ZZZΣ
ρdV r2ω
4

Le moment cinétique par rapport à l’axe ∆est donc proportionnel à la vitesse angulaire de
rotation du solide autour de l’axe. On exprimera σ∆sous la forme
σ∆=J∆ω
J∆est appelé moment d’inertie du solide par rapport à l’axe ∆.
Dimensionnellement [J∆] = M.L2(kg.m2en unité SI).
Le moment d’inertie traduit la répartition spatiale de la masse autour de l’axe de rotation.
Exemples :
•Système de masse m, constitué de deux points matériels de masses m
2rigidement liés par une
tige de masse négligeable :
J∆= 2 ×m
2
22
=m2
4
•Tige de masse m, homogène, de longueur en rotation autour d’un axe ∆perpendiculaire
passant par son milieu :
J∆=m2
12
Dans ce deuxième cas, la même masse mest répartie uniformément sur toute la longueur de la
tige : le moment d’inertie est plus faible que celui trouvé dans le premier cas où la toute masse
mse trouvait aux points les plus éloignés de l’axe ∆.
De manière générale plus la masse est répartie loin de l’axe, plus le moment d’iner-
tie augmente (exemple : suivant que l’on place les bras perpendiculairement au corps ou le
long du corps, on modifie son moment d’inertie par rapport à un axe vertical passant par G,
voir cas du patineur).
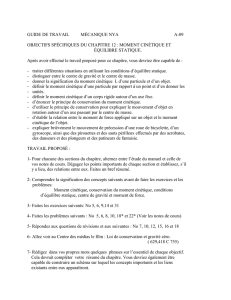
•Tige de masse m, homogène, de longueur en rotation autour d’un axe ∆perpendiculaire
passant par une de ses extrémités :
Tige homogène de masse masse m, de longueur
J∆=m2
3
Si toute la masse métait concentrée à l’autre extrémité de la tige, le moment d’inertie vaudrait
J∆=m2. Il est donc normal ici de trouver une valeur inférieure.
Justification :
On découpe la tige en petits éléments, de longueur dr, de masse dm=m
`drcar la tige est
homogène. Chaque élément de longueur possède un moment d’inertie dm r2. On additionne
ensuite tous ces moments d’inertie en posant l’intégrale :
J∆=Z`
0
dm r2=Z`
0
m
dr r2=m
Z`
0
r2dr=m
3
3=m2
3
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%